A master manipulator with force feedback for minimally invasive surgery
A main operator, minimally invasive surgery technology, applied in the field of medical machinery, can solve the problems that the structure and function cannot fully meet the needs of minimally invasive surgery, the clamping mechanism does not have a force feedback function, and the unfavorable surgical instruments and tissue force, etc. Achieve the effect of small space, compact structure and improved rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
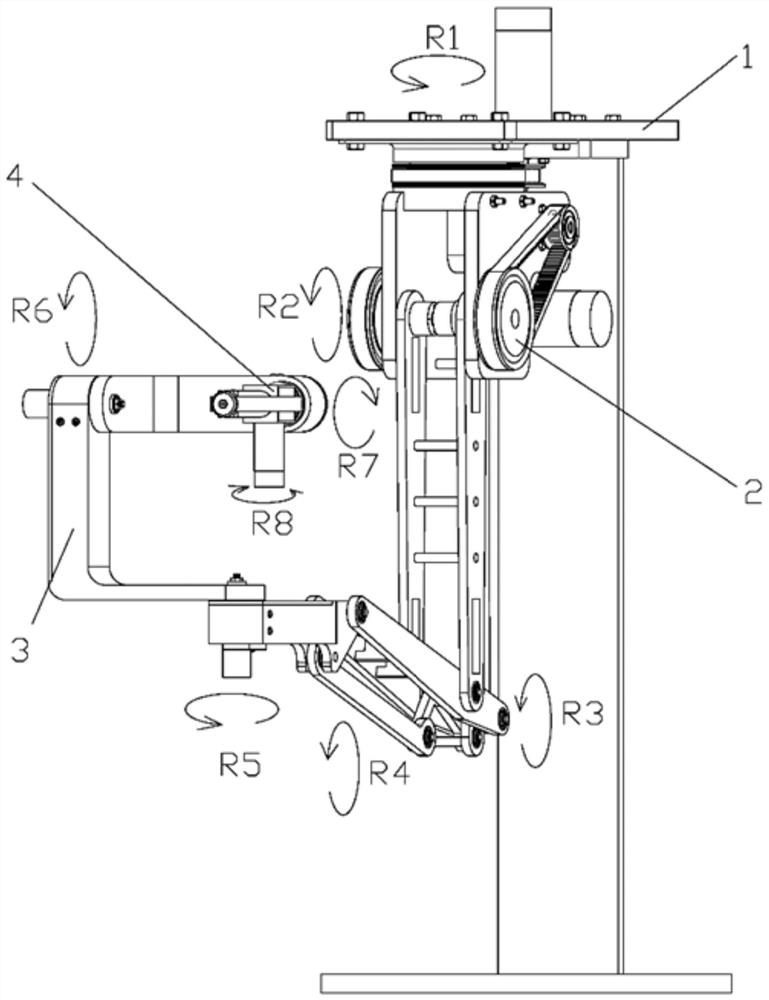
[0037] This embodiment discloses a force feedback main manipulator for minimally invasive surgery, including a base 1, an arm position adjustment mechanism 2, a wrist posture adjustment mechanism 3 and a clamping mechanism 4, with a total of eight degrees of freedom. Among them, R1, R2, R3, R5, R6, R7, and R8 are connected with seven joint motors, which are active joints and can provide force feedback; R4 is connected with a double parallelogram mechanism, which is a passive joint to realize the wrist posture adjustment mechanism 3 Always maintain standard.
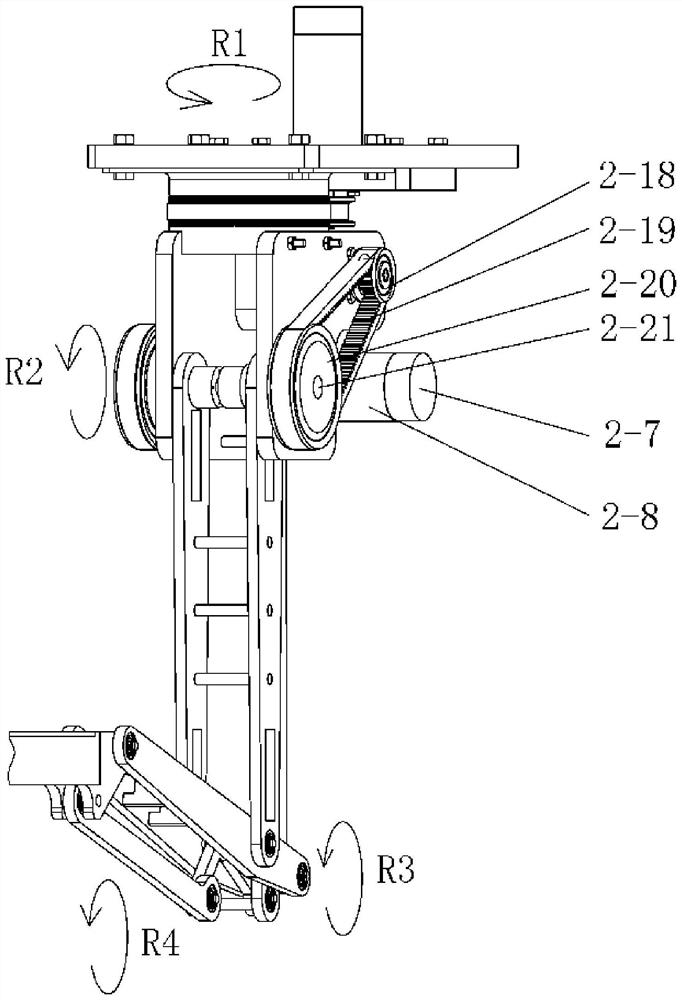
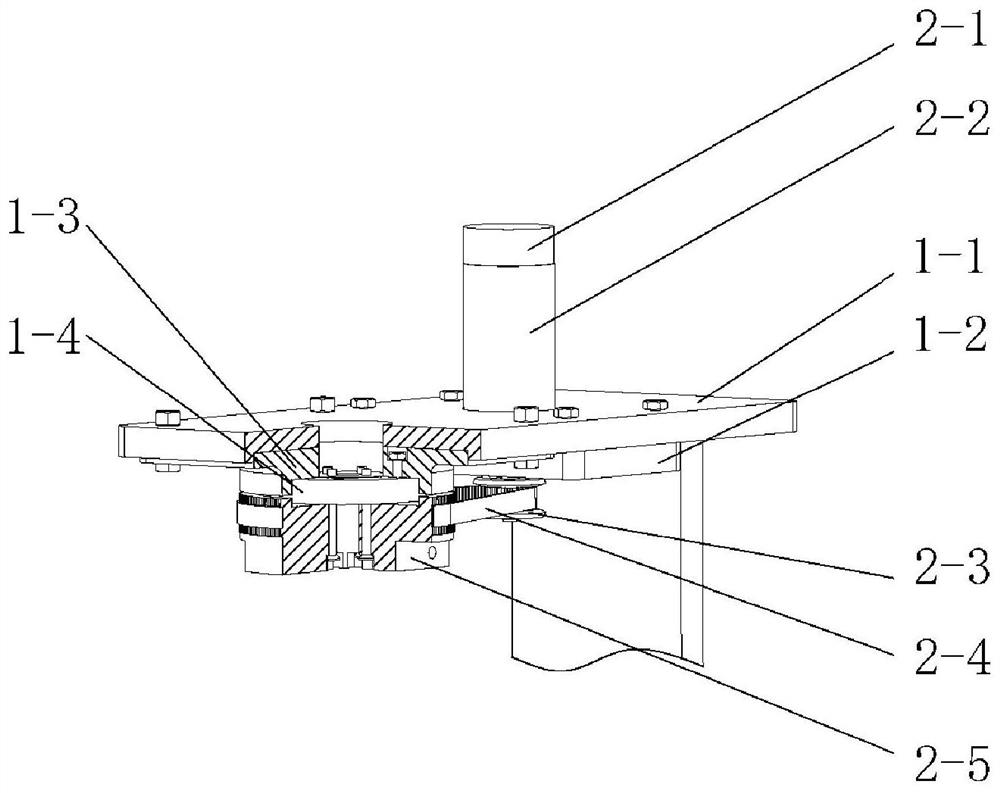
[0038] Please refer to figure 2 , image 3 , Figure 4 , Figure 5 , the base 1 includes a base 1 frame, a base 1 motor frame, a base 1 bearing seat and a slewing bearing, the base 1 frame and the base 1 bearing seat are installed on the base 1 frame, and the slewing bearing is connected to the base 1 With the first position adjustment mechanism; the central axis of the slewing bearing is the R1 axis, and the base fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com