Method for identifying drivable area of vehicle based on laser radar sensor
A driving area and lidar technology, applied in the field of intelligent vehicle environment perception, can solve the problems of too much point cloud data, poor accuracy, hidden dangers, etc., to ensure driving safety, improve real-time performance, and reduce the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
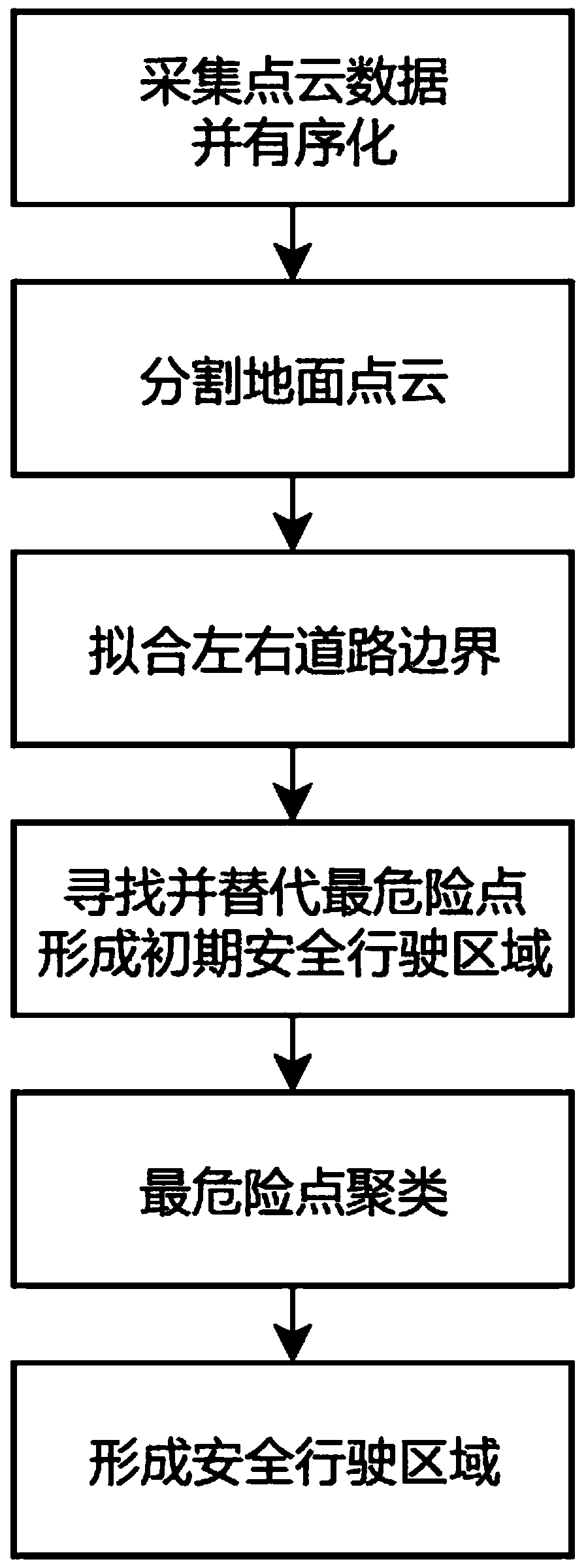
[0035] refer to figure 1 , the present invention provides a method for identifying the safe driving area of a vehicle based on a laser radar sensor, which specifically includes collecting and ordering point cloud data, segmenting the ground point cloud, fitting the left and right road boundaries, and finding the most dangerous points to form an initial safety zone. There are six parts including the driving area, the repairing initial safe driving area, and the formation of the final safe driving area.
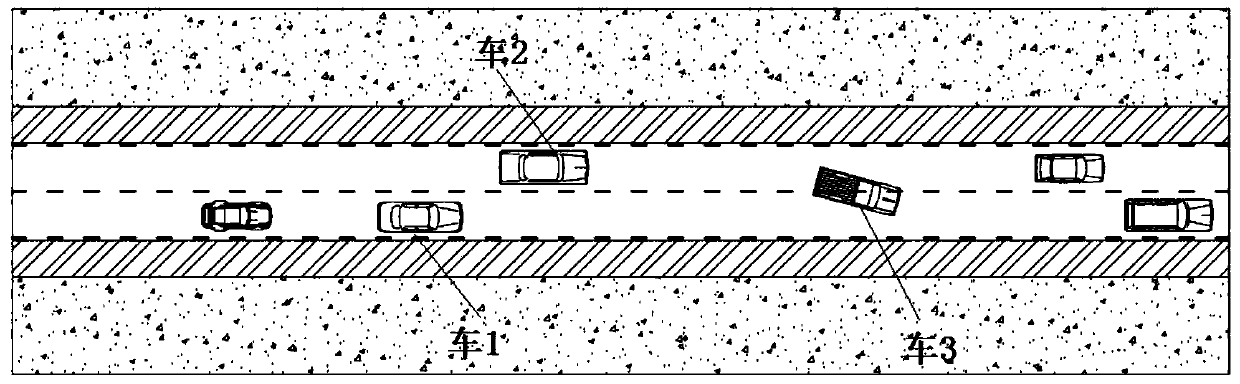
[0036] refer to figure 2 , this method is mainly applicable to structured roads, in which the road area CD is relatively flat, there is a height difference of 0.1-0.2m between the non-road area AB and EF area relative to the road area, and there is an obvious height difference between the boundary area BC and DE Jump. details as follows:
[0037] Step 1. Install the solid-state lidar at the front of the vehicle at a height of 0.4-0.5m from the ground. The installation pos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com