Anti-false-collision robot emergency stop circuit
An emergency stop circuit and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of accidental touch of emergency stop button, accidental shutdown, etc., and achieve the effect of reliable disconnection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] For the foregoing and other technical contents, features and effects of the present invention, please refer to the attachment below Figure 1 to Figure 3 It will be clearly presented in the detailed description of the embodiments. The structural content mentioned in the following embodiments are all referenced to the drawings in the specification.
[0013] Hereinafter, each exemplary embodiment of the present invention will be described with reference to the drawings.
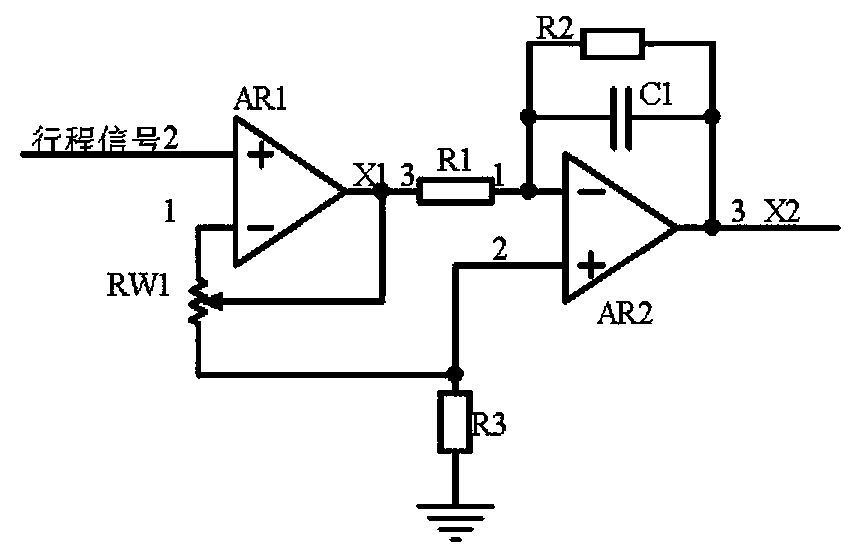
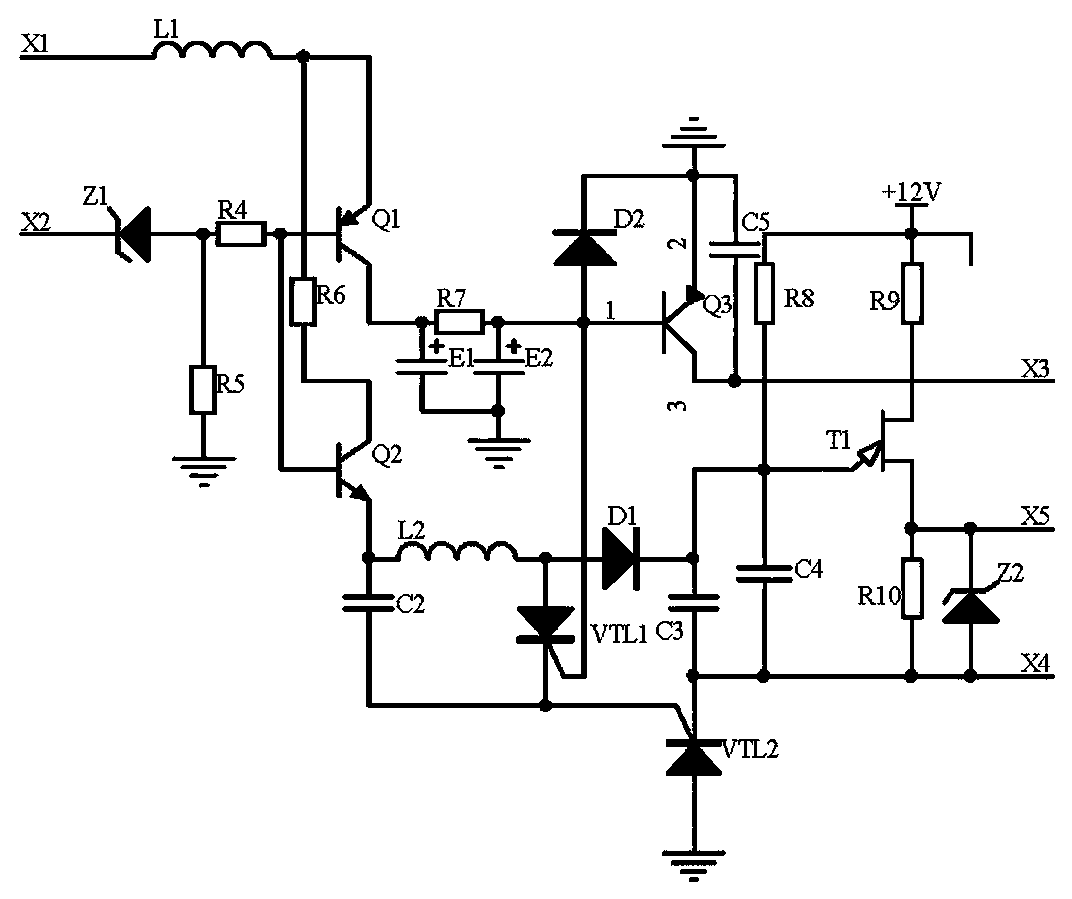
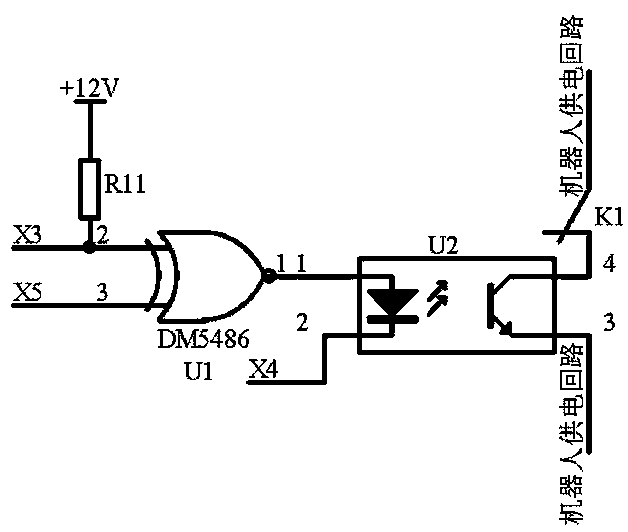
[0014] The emergency stop circuit of the anti-mishandling robot includes a push rod and a normally closed contact. The push rod is also connected with a displacement sensor for detecting the stroke. The stroke signal of the push rod detected by the displacement sensor is passed through a stroke change rate calculation circuit, a false touch judgment circuit, The interlock output circuit is processed in series with the normally closed contact and acts on the power supply circuit of the robot;
[0015] The stro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com