Anti-collision robot emergency stop circuit
An emergency stop circuit and robot technology, applied in manipulators, program control manipulators, manufacturing tools, etc., can solve problems such as accidental shutdown and accidental touch of the emergency stop button K1
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] Regarding the aforementioned and other technical contents, features and effects of the present invention, refer to the appended Figure 1 to Figure 3 It will be apparent from the detailed description of the embodiments. The structural contents mentioned in the following embodiments are all based on the accompanying drawings of the description.
[0013] Exemplary embodiments of the present invention will be described below with reference to the accompanying drawings.
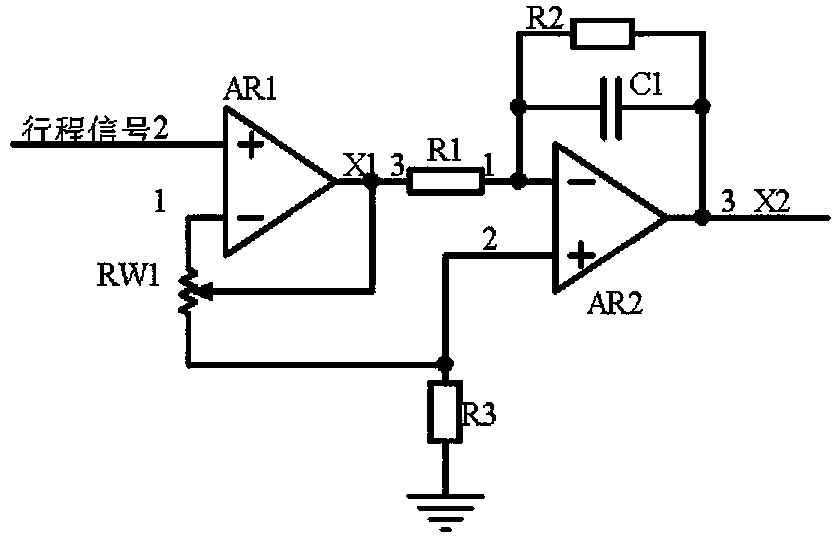
[0014] The emergency stop circuit of the anti-mis-touch robot includes a push rod and a normally closed contact. The push rod is also connected to a displacement sensor for detecting stroke. After the interlock output circuit is processed, it acts in series with the normally closed contact on the power supply circuit of the robot;
[0015] The stroke change rate calculation circuit adopts the operational amplifier AR1 to receive the push rod stroke signal of the emergency stop button K1 detected by the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com