Photographing control method and device of unmanned aerial vehicle, unmanned aerial vehicle and storage medium
A control method and unmanned aerial vehicle technology, which is applied in the field of unmanned aerial vehicle surveying and mapping, and can solve problems such as lack of surveying and mapping data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
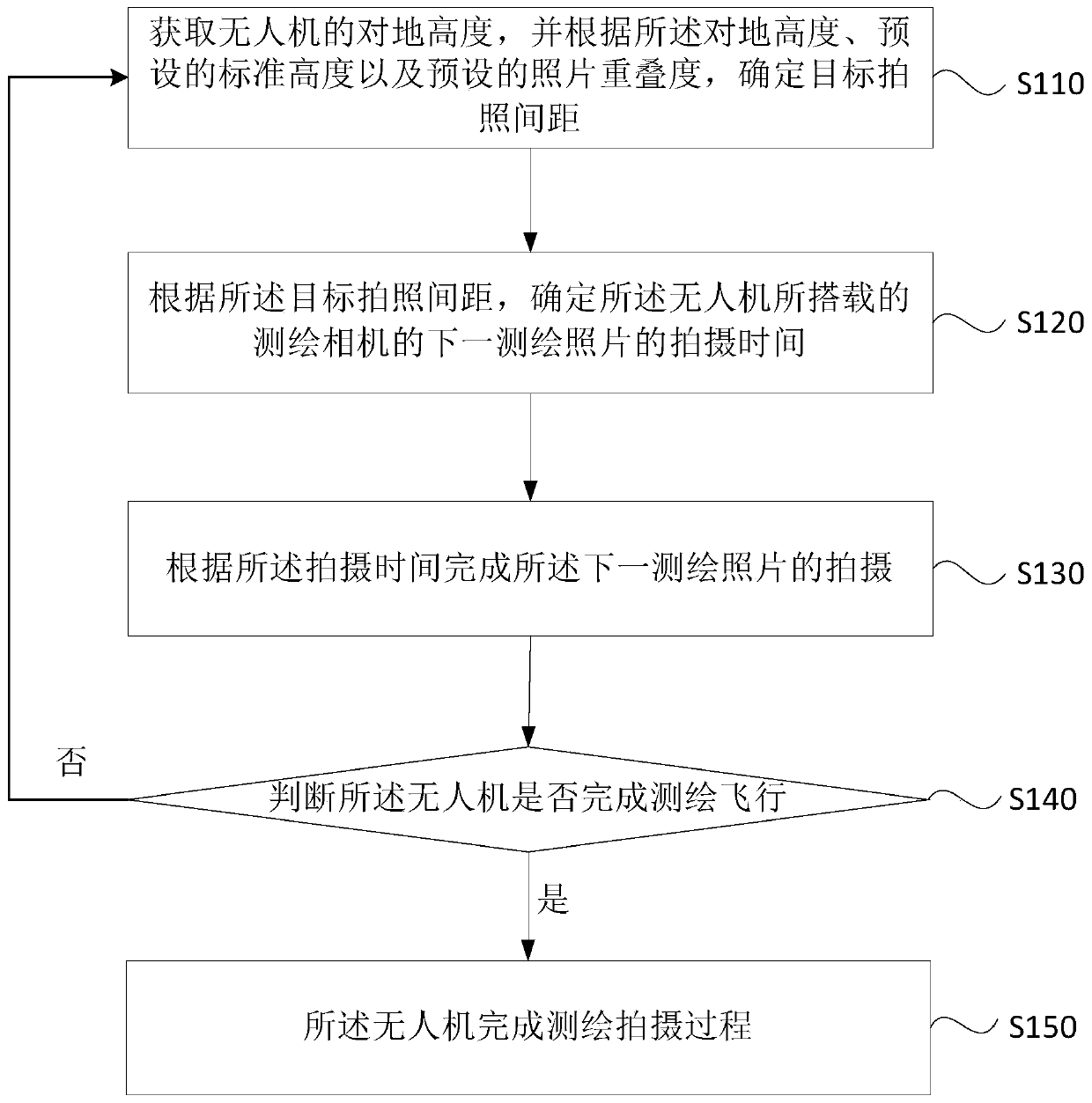
[0045] figure 2 This is a flowchart of a drone camera control method provided in the first embodiment of the present invention. This embodiment can be applied to the situation where the drone is used to complete surveying and mapping tasks. The method can be executed by the drone camera control device The device can be implemented by software and / or hardware, and can generally be integrated in a drone, specifically including the following steps:
[0046] Step 110: Obtain the ground height of the drone, and determine the target photographing distance according to the ground height, the preset standard height, and the preset photo overlap;
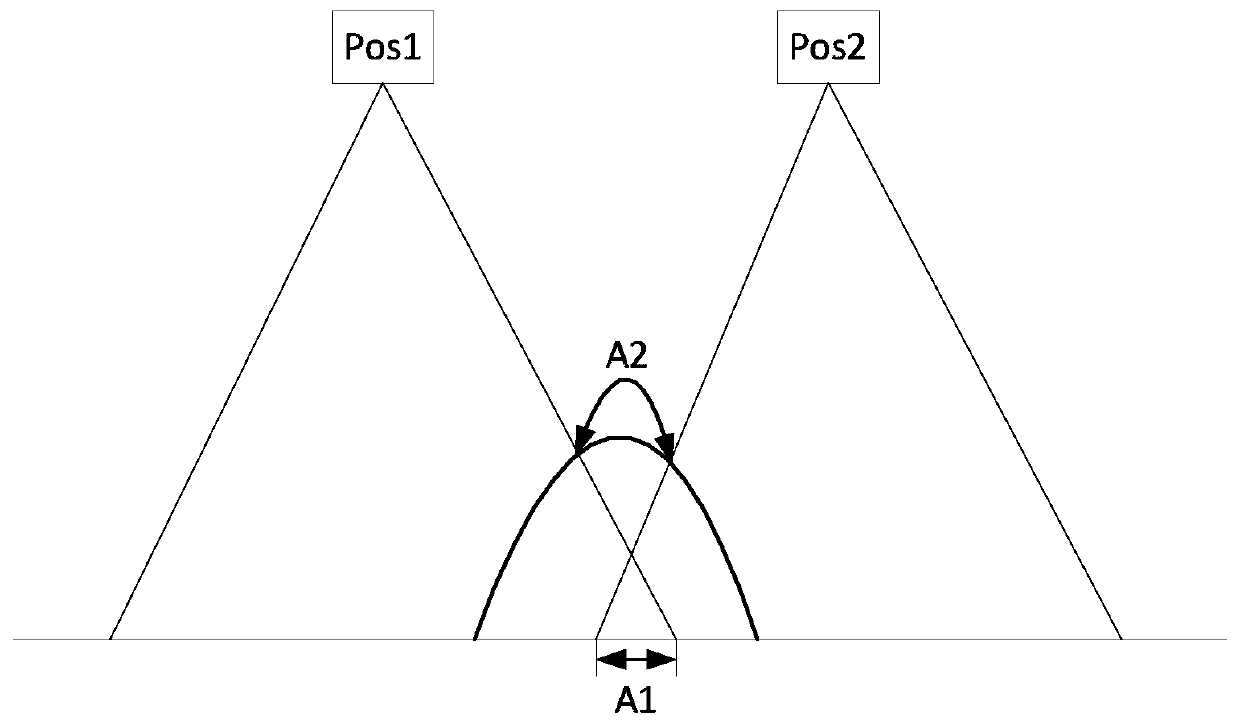
[0047] Among them, unmanned aerial vehicles are unmanned aircraft operated by radio remote control equipment and self-provided program control devices, or operated by on-board computers completely or intermittently autonomously. The altitude of the drone is the distance between the current location of the drone and the ground. figure 1 In the ph...
Embodiment 2
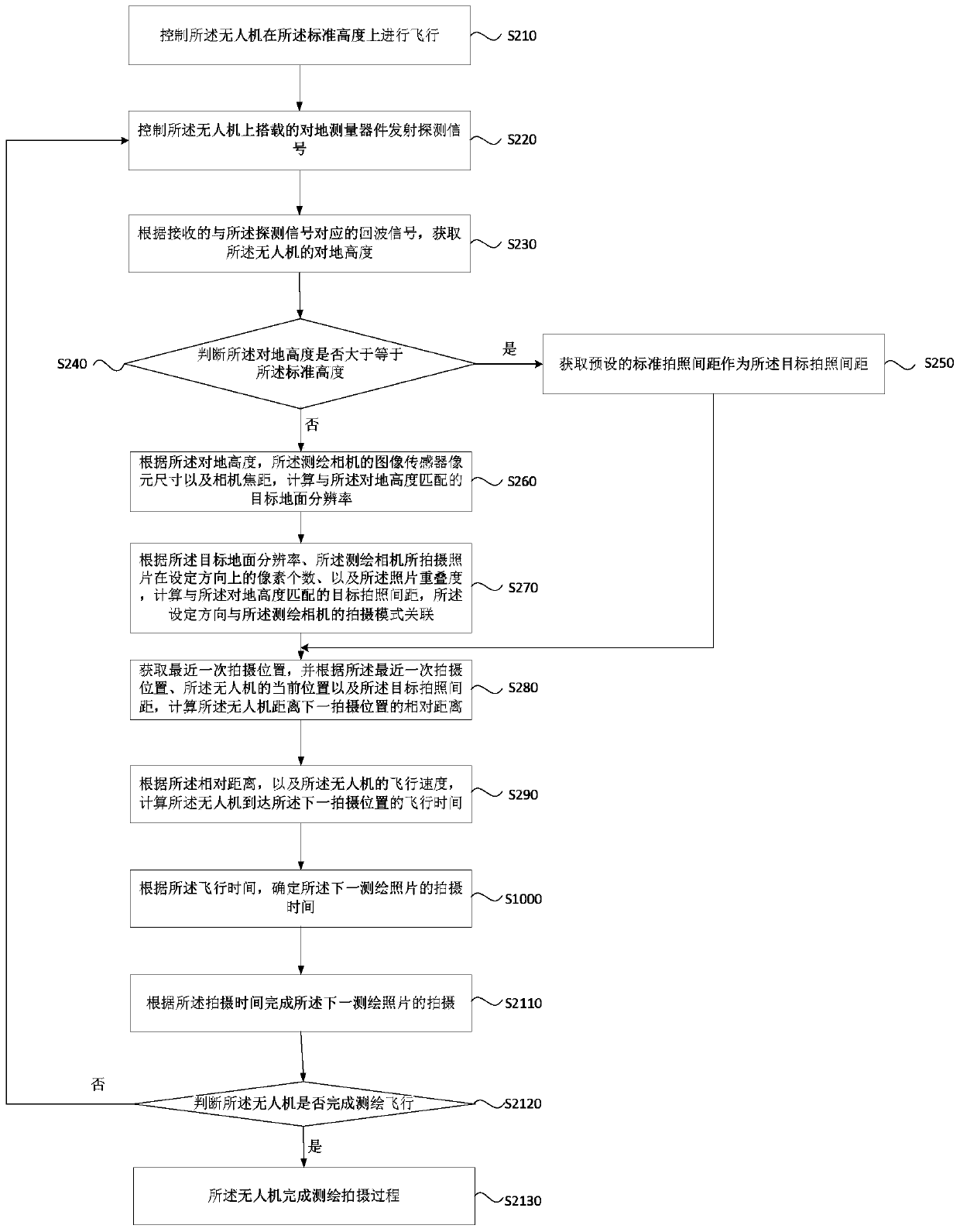
[0060] image 3 It is a flowchart of a photographing control method of a drone in the second embodiment of the present invention. On the basis of the above-mentioned embodiment, the embodiment of the present invention calculates the distance between photographing targets according to the height of the drone on the ground, and according to the target The calculation of the photographing interval for the next photographing time is specified. The steps of this embodiment include:
[0061] Step 210: Control the drone to fly at the standard altitude;
[0062] Wherein, the standard height is determined by a preset standard ground resolution, and the standard photo interval is determined by the standard ground resolution and the preset photo overlap.
[0063] Among them, the relationship between height and ground resolution is: H=(f*GSD) / a. Among them, H is the height, GSD is the ground resolution, and the ground resolution is also called the spatial resolution, which refers to the ability...
Embodiment 3
[0091] Figure 4 It is a schematic structural diagram of a photographing control device of a drone in the third embodiment of the present invention. The photographing control device of the drone includes: a target photographing distance determination module 310, a photographing time determination module 320, and a return execution module 330, wherein :
[0092] The target photographing distance determining module 310 is configured to obtain the ground height of the drone, and determine the target photographing distance according to the ground height, the preset standard height, and the preset photo overlap;
[0093] The shooting time determining module 320 is configured to determine the shooting time of the next surveying and mapping photo of the surveying and mapping camera carried by the drone according to the target shooting distance;
[0094] The return execution module 330 is configured to return to execute the operation of obtaining the ground height of the drone after the shoo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com