Comprehensive cost optimal path planning method for rolling polyhedron tensioning whole robot
A technology of optimal path planning and tensegrity, which is applied in the direction of instruments, motor vehicles, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0034] This example takes a six-rod twenty-four cable tensioning overall robot as an example to explain. More specifically, this example introduces the applicability and reliability of the method through a scenario 1, and the specific situation of the scenario 1 will be introduced later.
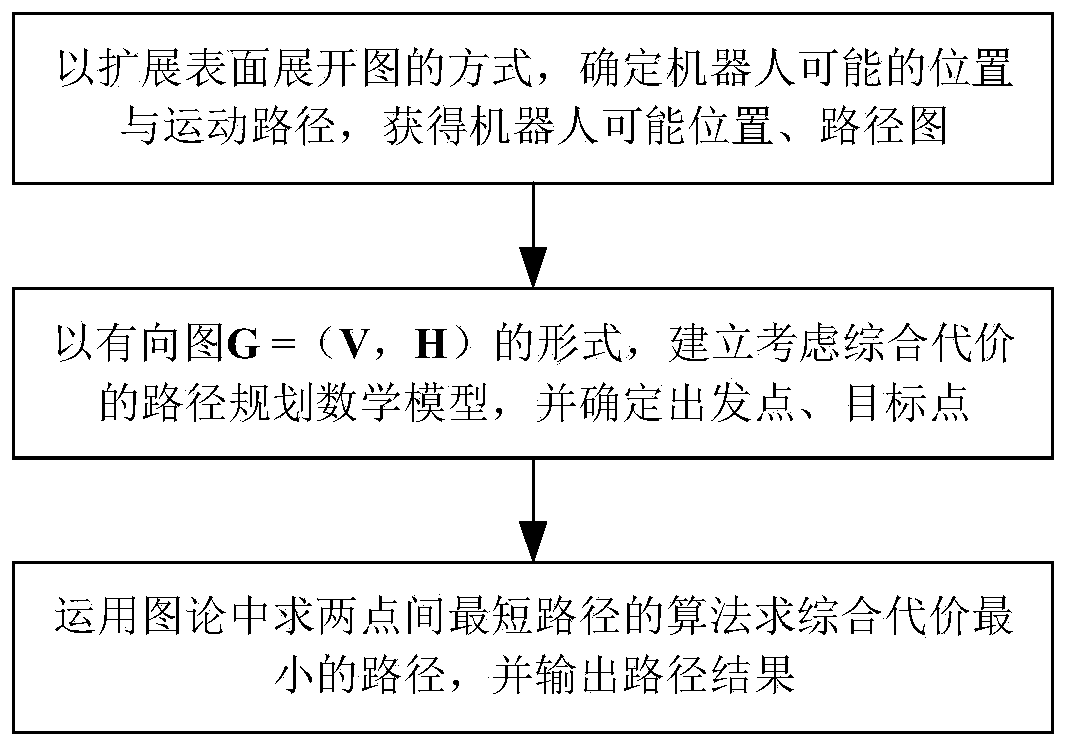
[0035] The first step is to determine the possible position and motion path of the robot according to the overall gait and configuration characteristics of the six-bar twenty-four cable tension, and obtain the possible position and path map of the robot.
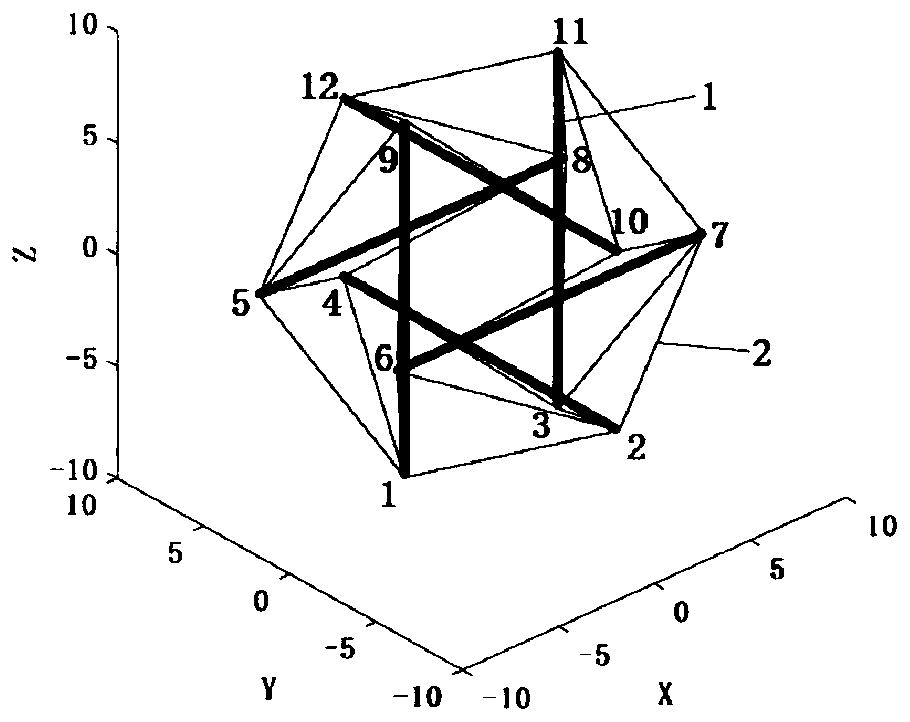
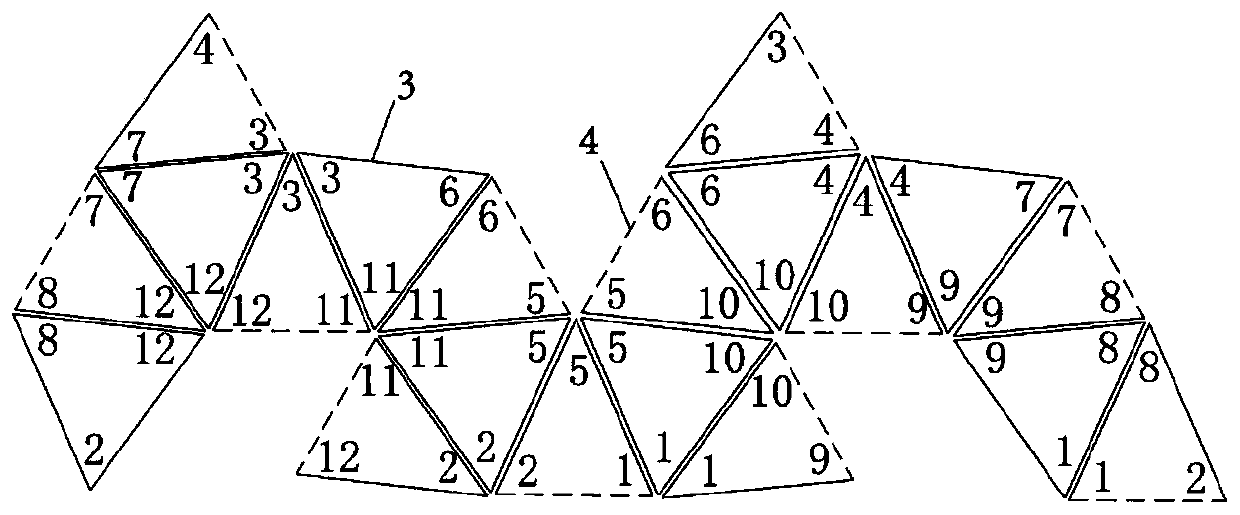
[0036] The configuration of a six-rod twenty-four cable tensioned whole is as follows figure 2 As shown, it is composed of six compression rods 1 and twenty-four stay cables 2, and its configuration is an icosahedron, and the number of each vertex is marked in figure 2 middle. Expanding the surface of the icosahedron, we can obtain image 3 As shown in the surface expansion diagram, the icosahedron vertex numbers corresponding to the ...
Embodiment 2
[0055] This example takes a six-rod twenty-four cable tensioning overall robot as an example to explain. More specifically, Embodiment 2 specifically introduces the applicability and reliability of the method through three scenarios, scenario 2, scenario 3, and scenario 4. Details of scenarios 2, 3, and 4 will be introduced later.
[0056] The first step is to determine the possible position and motion path of the robot according to the overall gait and configuration characteristics of the six-bar twenty-four cable tension, and obtain the possible position and path map of the robot.
[0057] The configuration of a six-rod twenty-four cable tensioned whole is as follows figure 2 As shown, it is composed of six compression rods 1 and twenty-four stay cables 2, and its configuration is an icosahedron, and the number of each vertex is marked in figure 2 middle. Expanding the surface of the icosahedron, we can obtain image 3 As shown in the surface expansion diagram, the icos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com