Underwater Impulse Acoustic Positioning System Based on Multiacoustic Wave Glider and Unmanned Surface Vehicle
A technology of unmanned boats and glider, applied in satellite radio beacon positioning system, radio wave measurement system, positioning, etc., can solve communication difficulties and other problems, and achieve high communication efficiency, easy and smooth communication
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
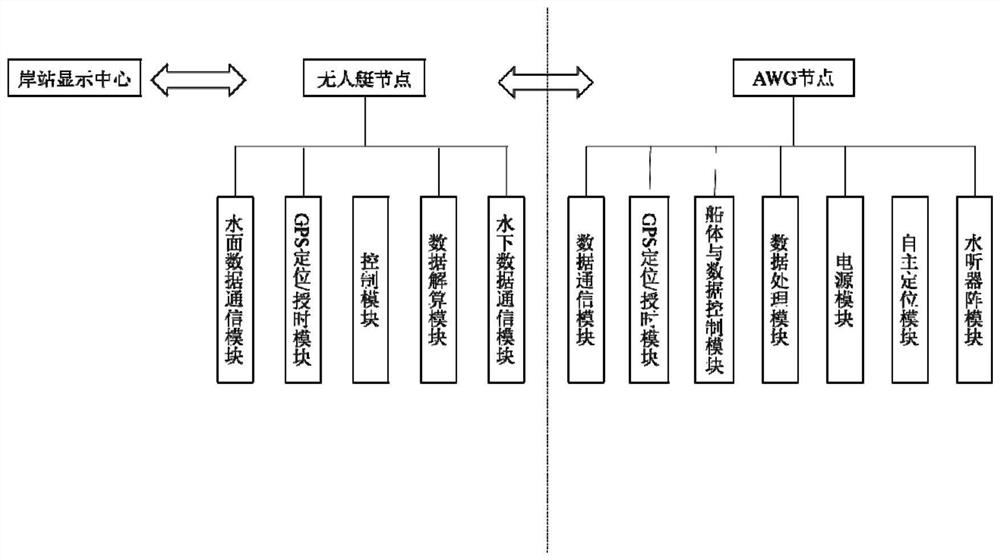
[0061] Specific implementation mode 1: refer to Figure 1 to Figure 4 Specifically describing this embodiment, the underwater pulse sound positioning system based on a multi-acoustic wave glider and a surface unmanned boat described in this embodiment includes: an unmanned boat node and an AWG node,
[0062] The unmanned boat node is used for positioning and solving the data obtained by the AWG node through underwater transmission, and transmitting the positioning and solving to the shore station for display;
[0063] The AWG node is used to receive the target acoustic signal in the water and perform signal detection, positioning and other processing, obtain the GPS location information and time of each node of the AWG through GPS, and transmit the data to the unmanned boat node;
[0064] The specific steps of the signal detection are: when there is no pulse signal, intercept the background noise signal received by the hydrophone connected to the AWG for 1 second, take the squ...
specific Embodiment approach
[0115] (1) Use a depth gauge and a sound speed profiler to measure in the test sea area to obtain the sea depth and sound speed profile information of the test sea area.
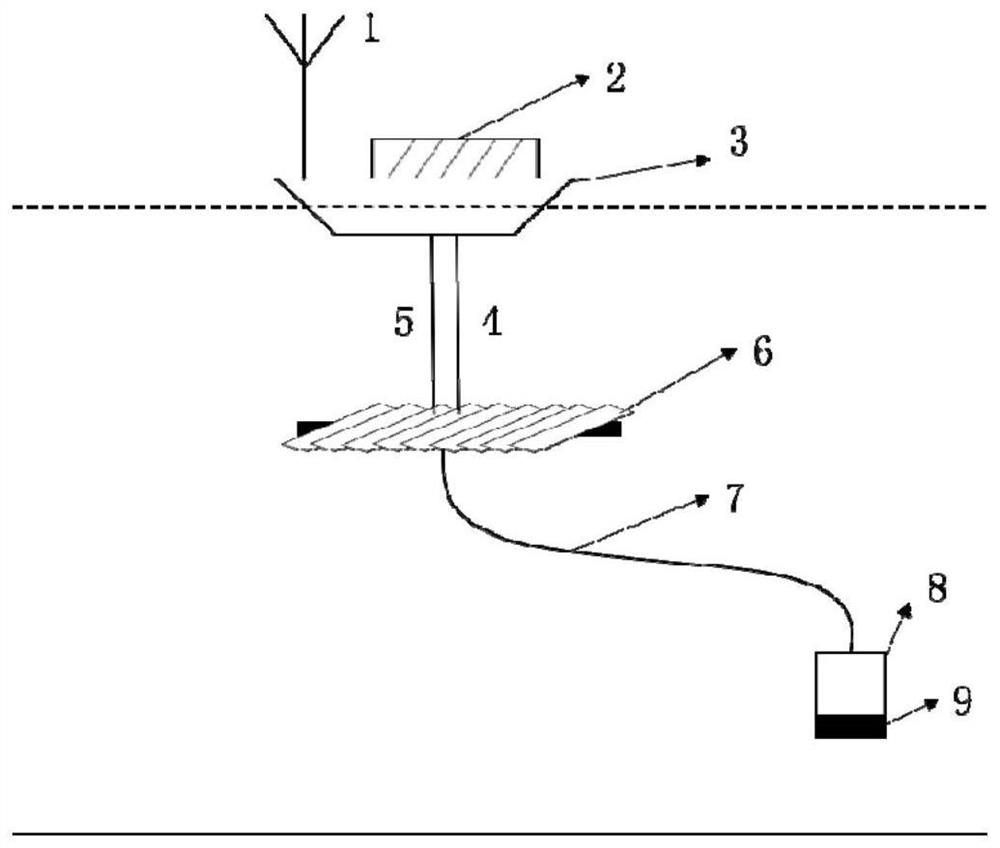
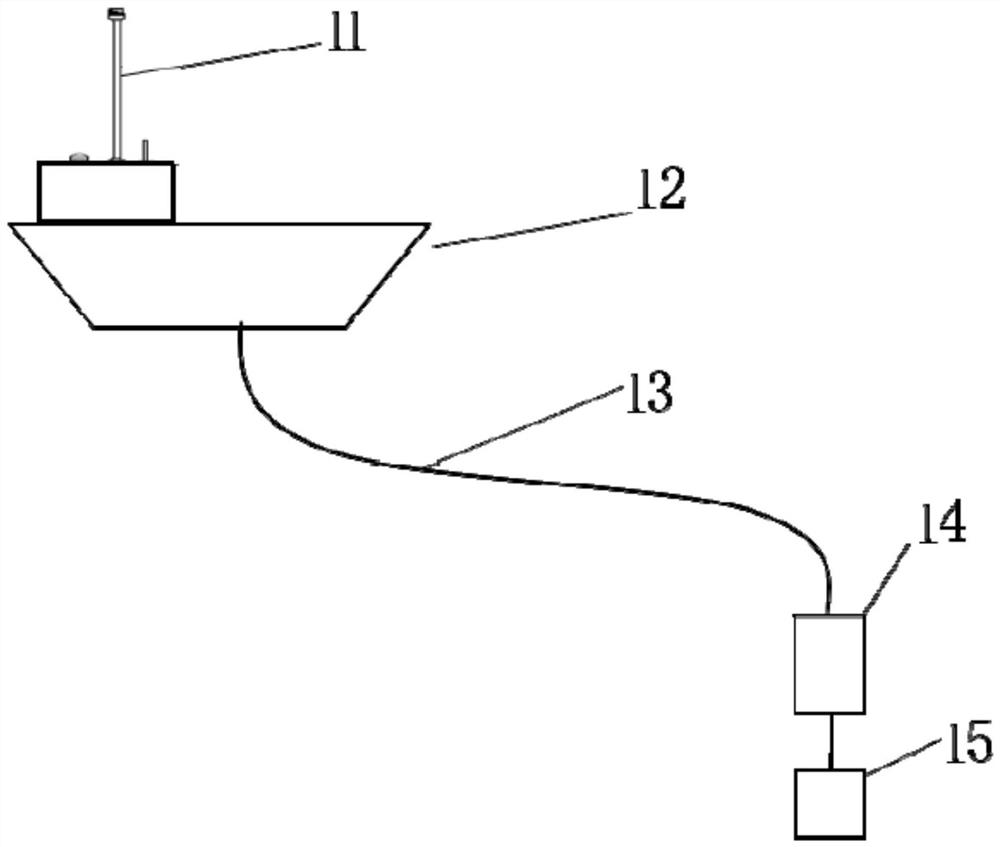
[0116] (2) Each of the four acoustic wave gliders (AWGs) is connected to a quaternary cross-type hydrophone array and placed in a designated position in the water.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com