A Real-time Obstacle Avoidance Method for Collaborative Robots
A robot and obstacle avoidance technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of local minima, no obstacle avoidance strategy, etc., to achieve good flexibility and avoid physical overrun effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0036] The real-time obstacle avoidance method of the collaborative robot provided in this embodiment mainly includes the following steps:
[0037] (1) Construction of obstacle avoidance model
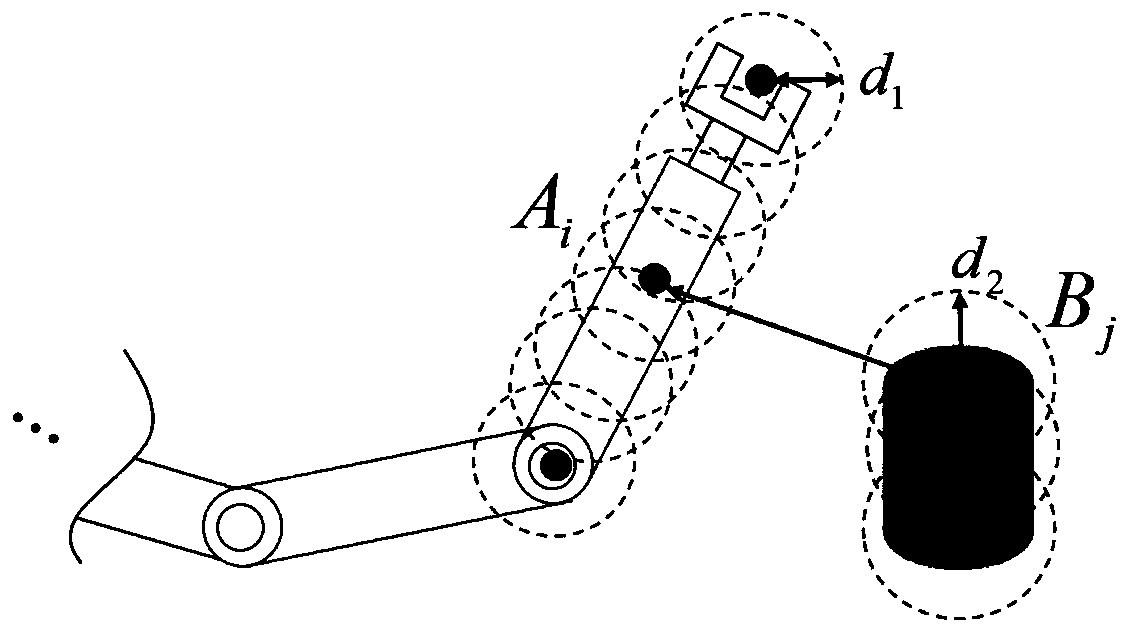
[0038] The schematic diagram of the obstacle avoidance of the robot arm is as follows: figure 1 shown. Since the mechanism information of the manipulator is consistent, a group of key points A can be evenly selected on each connecting rod of the manipulator body i , and define a radius d 1 , so that at point A i is the center of the ball, d 1 A collection of a series of spheres with radius can completely enclose the body of the manipulator; for example figure 1 As shown on the left; in the same way, by obtaining the image information of the obstacle avoidance, select a group of B j and radius d 2 To wrap the obstacle; in order to avoid collision, select a certain margin Δd>0, and define the safety distance d=d 1 +d 2 +Δd, during the working process of the robot, if all A i an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com