Guide operating system of robot operation arm, compliant operation control method thereof and demonstration learning method thereof
A manipulation system and robot technology, applied in the field of human-machine collaborative operation system development, can solve the problems of lack of a flexible manipulation control method, a joystick that cannot achieve all-round manipulation, and a lack of intelligent teaching and learning methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] combined with Figures 1 to 6 , the realization of the present invention is described as follows:
[0045] The disclosed content of the present invention is divided into three parts, namely, the body design scheme of the omnidirectional guiding and manipulating device, the compliant manipulating and controlling method of the robot manipulating arm, and the operation teaching and learning method of kinematics and force coupling.
[0046] For the body design problem of the all-round guiding and manipulating device, the technical solution adopted by the present invention is:
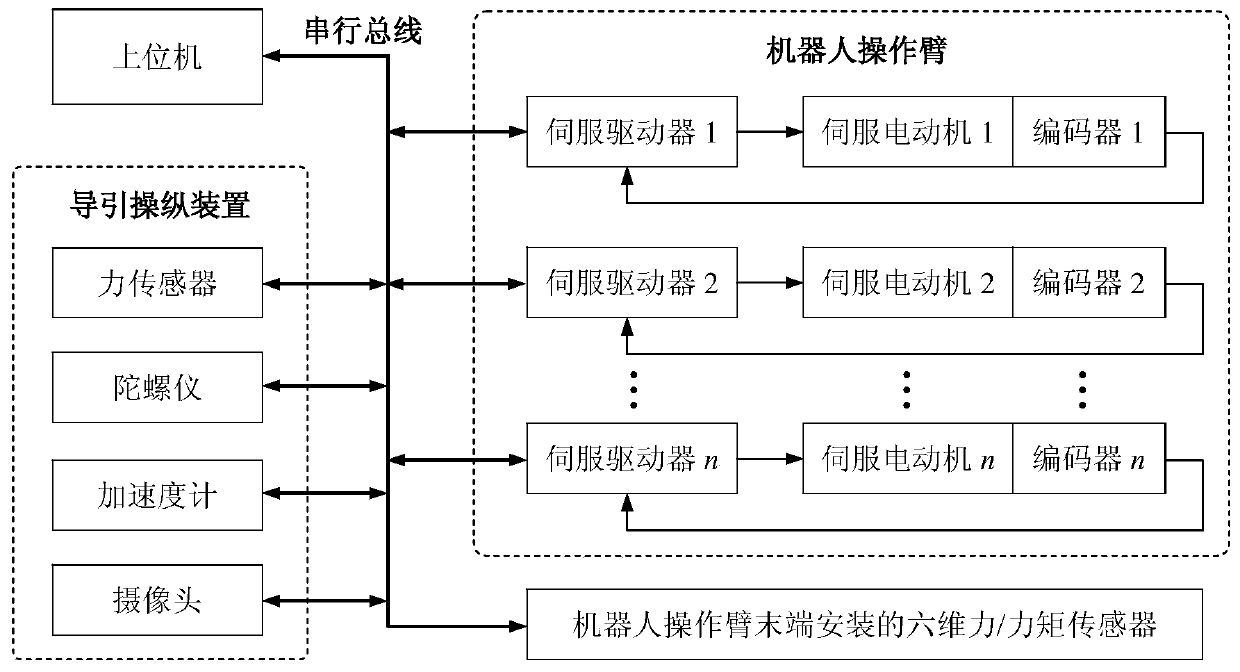
[0047] Such as figure 1 As shown, the overall system for guiding and manipulating operations includes: a robot manipulator arm 1 , a six-dimensional force / torque sensor 2 , a guiding and manipulating device 3 , an object to be operated 4 , an operating object 5 , and an operator 6 . One end of the guiding and manipulating device 3 is connected to the tool-side interface of the six-dimensional force...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com