Encircling swallowing type navel orange picking actuator
A technology for actuators and navel oranges, applied in the field of agricultural picking robots, can solve the problems of reducing driving, reducing difficulty, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
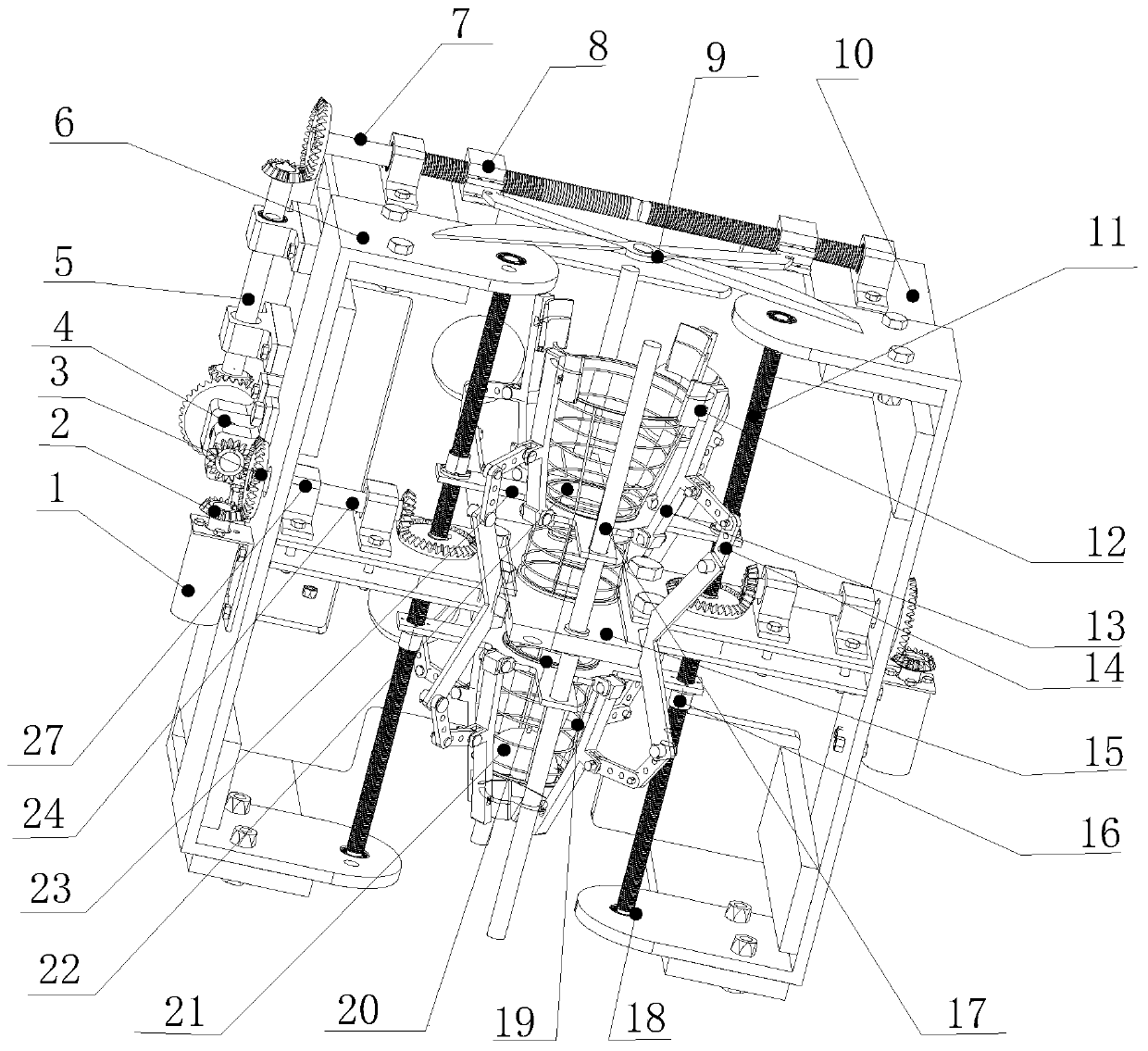
[0020] Embodiment 1, see figure 1 or Figure 10 , a kind of embracing and swallowing type navel orange picking actuator, wherein: the upper and lower sides of the fixed support plate 15, and the left and right sides are symmetrically arranged, and the drive output by the motor 1 on the left one-way screw support plate 6 is driven by a bevel gear to The two-way way realizes power transmission, and one way drives the two-way screw 7 to move through the gear shaft 4 and the gear shaft 5, and finally drives the shear nut 8 that cooperates with the two-way screw 7 to move, thereby driving the opening and closing of the scissors 9, realizing The fruit handle is separated, and the other way drives the one-way lead screw 11 to move through the gear shaft 24, thereby driving the nut sleeve 16 to move, and the fixed support plate 15 is fixed. The lower along the polished rod 17 realizes the same direction movement, thereby driving the 13 groups of clamping rods on both sides of the fix...
Embodiment 2
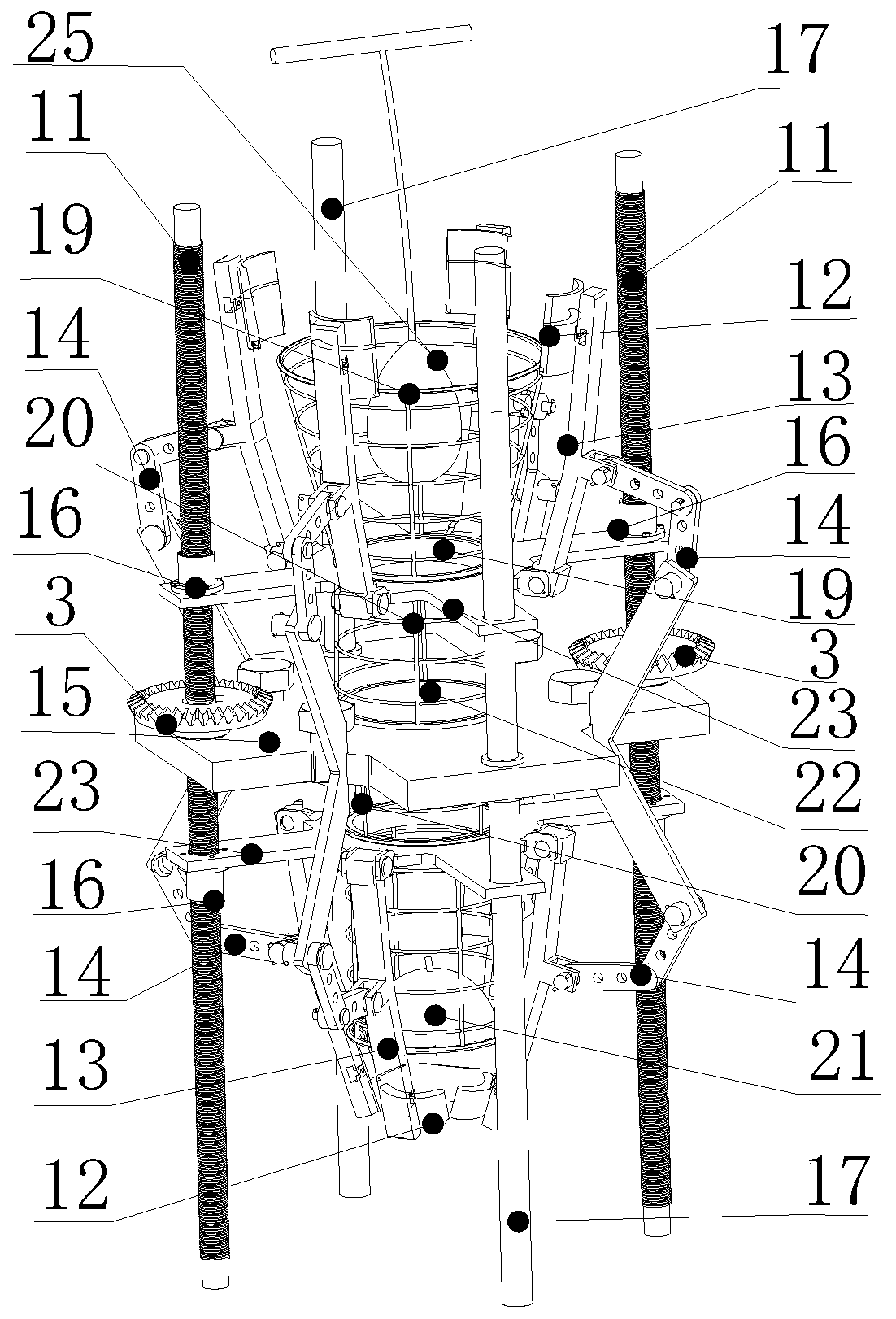
[0021] Example 2, see figure 2 , a embracing and swallowing type navel orange picking actuator, wherein: the fixed support plate 15 has a symmetrical structure in front, rear, left and right, and two polished rods 17 are fixedly connected on the fixed support plate 15 to guide the moving plate 23, and bearings are installed on its vertical side 18. Two one-way lead screws 11 are respectively connected with the bearings. Two large bevel gears 3 are connected with the one-way lead screw 11 by keys on the upper side of the fixed support plate 15. A set of nut sleeves 16 and one-way lead screw 11 It constitutes a spiral pair, and the nut sleeve 16 and the moving plate 23 are connected by bolts to be fixed as a whole. In addition, the through hole of the moving plate and the polished rod constitute a moving pair. The bottom of the bar 13 forms a revolving pair, and the middle position of the clamping rod 13 is connected with the connecting rod 14. In order to adjust the rotation s...
Embodiment 3
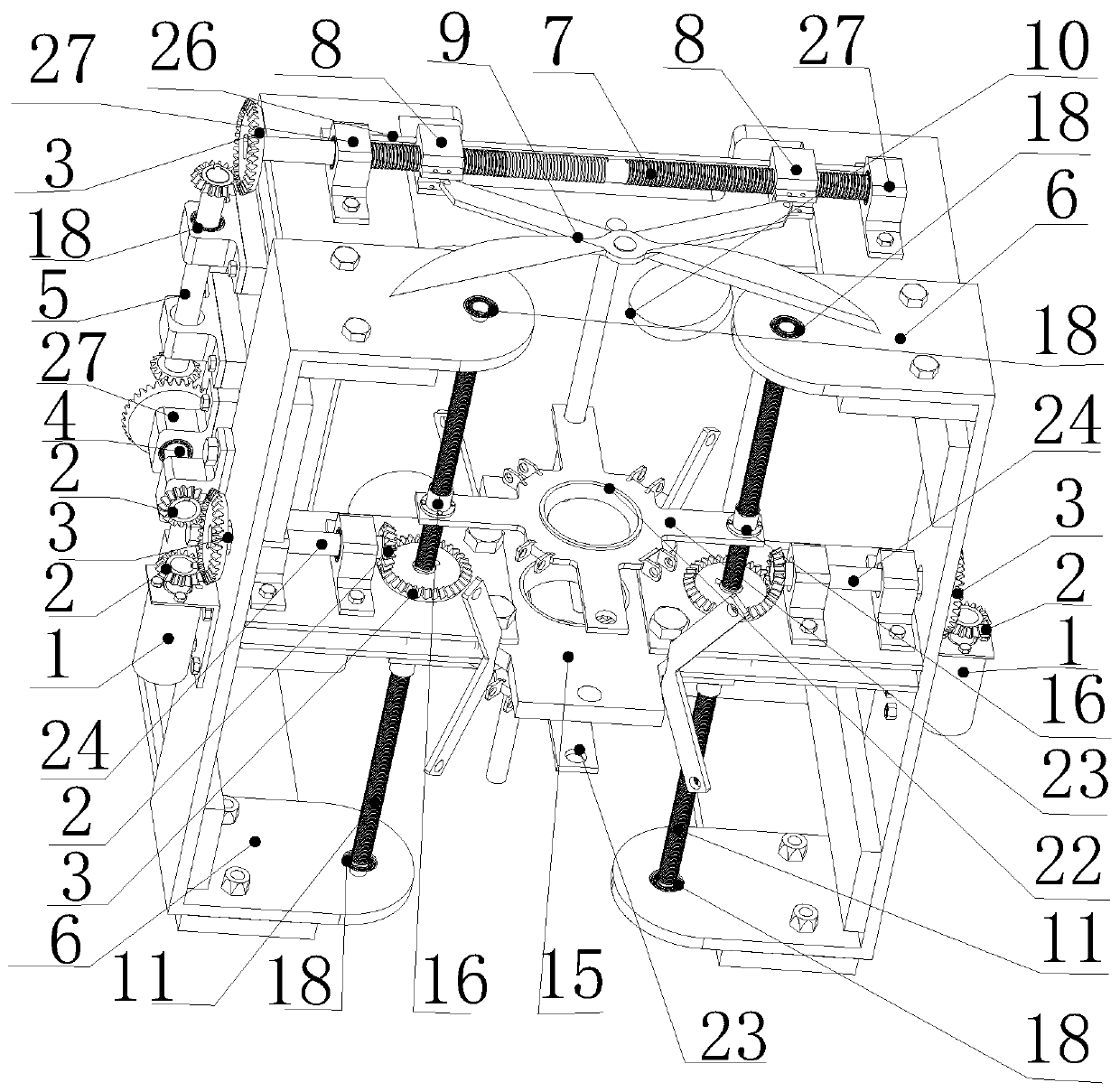
[0022] Example 3, see image 3, an encircling and swallowing navel orange picking actuator, wherein: the drive transmits power to the two-way lead screw 7 and the one-way lead screw 11 through multiple pairs of the same external meshing bevel teeth, and the connecting plate 10 of the mechanical arm is connected to two identical One-way lead screw support plate 6 is fixedly connected, and single lead screw support plate 6 is fixedly connected with fixed support plate 15 to ensure that it is fixed. Each one-way lead screw support bar 6 is fixedly installed with a motor 1 by a motor bracket, and the small The bevel gear 2 is connected with the shaft of the motor 1 through a key, the large bevel gear 3 is connected with the gear shaft 24 through a key, and the large bevel gear is connected with the small bevel gear 2 on the motor shaft and the small bevel gear 2 connected with the gear shaft 4 at the same time. Mesh to achieve the purpose of two-way drive transmission of the motor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com