A Remaining Life Prediction Method for Multi-sensor System
A multi-sensor, life prediction technology, used in instruments, measuring electricity, measuring devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
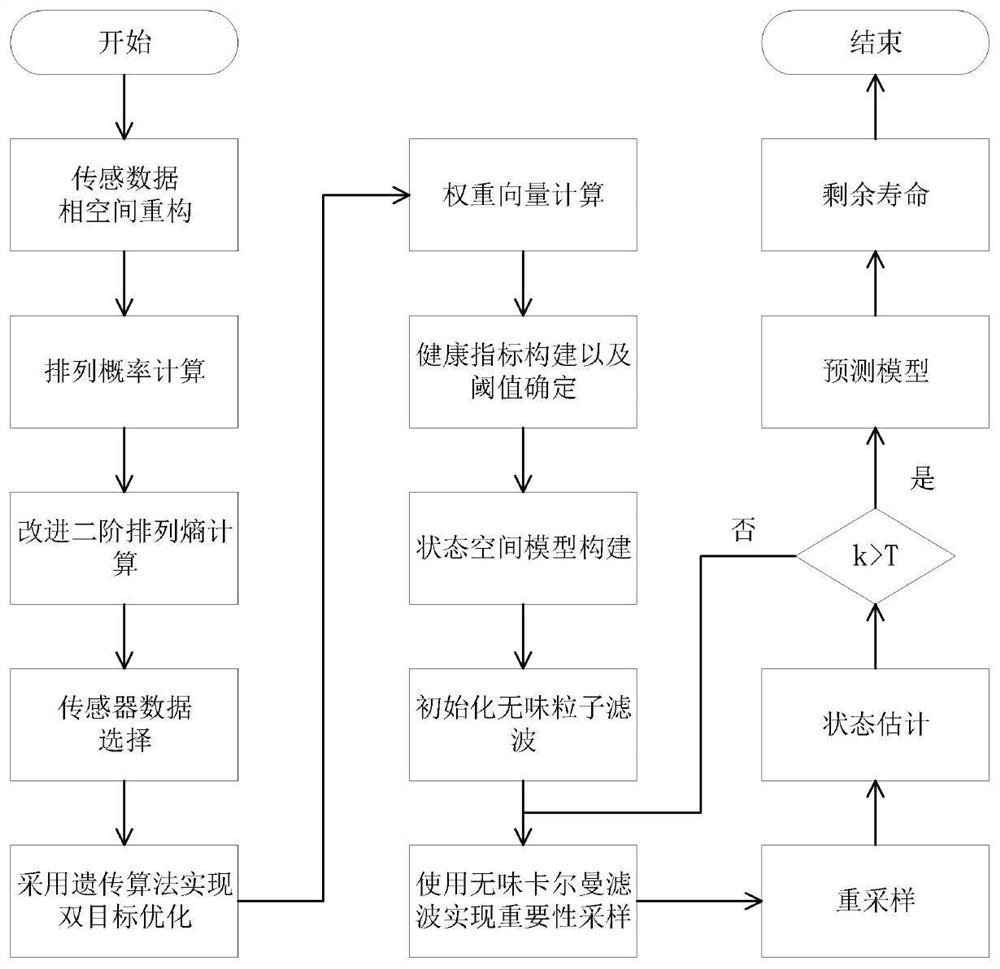
[0114] see figure 1 , a method for predicting the remaining life of a multi-sensor system, the method for predicting the remaining life of the multi-sensor system mainly includes using a data fusion method to characterize the health index of the electromechanical equipment and using a particle filter method to realize the prediction of the health state of the electromechanical equipment, the data fusion method By fusing multiple sensor data, a health indicator with a good degradation trend and a small threshold variance is constructed to characterize the health status of the device. When the health indicator is constructed using the data fusion method, the health indicator will often have a greater improvement. Second-order arrangement Entropy, to make the health index have a good overall monotonic trend, thereby improving the prediction accuracy of the remaining life of electromechanical equipment, the specific implementation steps are as follows:
[0115] S1 calculates the i...
Embodiment 2
[0143] see figure 1 , the difference between this embodiment and the above-mentioned embodiment is that: the tasteless Kalman filter is used in this embodiment to select the suggested distribution of the particle filter, since the particle filter algorithm uses the prior distribution as the suggested density distribution function, when the prior distribution and When the coincidence degree of the posterior distribution is very small, the effect of the particle filter algorithm is poor, so that when the particle filter algorithm is used to predict the remaining effective life of the electromechanical equipment, the prediction accuracy will be reduced accordingly. Therefore, the tasteless Kalman filter is used in this embodiment to To choose the proposed distribution of particle filter, first in the sampling stage, calculate the mean and covariance of each particle with tasteless Kalman filter, and then use the mean and covariance to guide sampling, and use tasteless Kalman filte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com