A robot control method, device and storage medium
A control method and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of inconvenience and low user experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
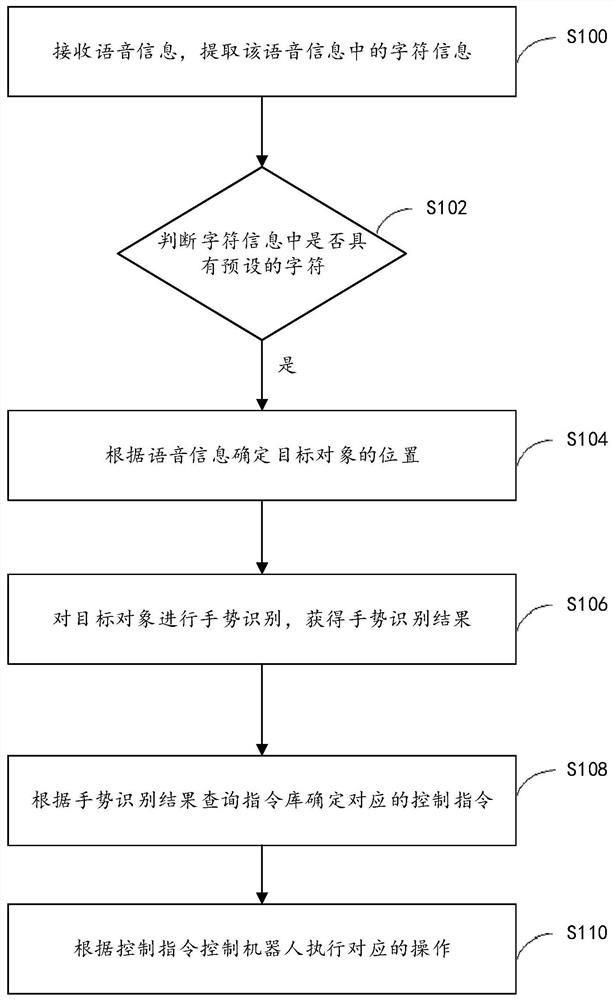
[0038]Such asfigure 1 As shown, the present application provides a robot control method, which includes the following steps:
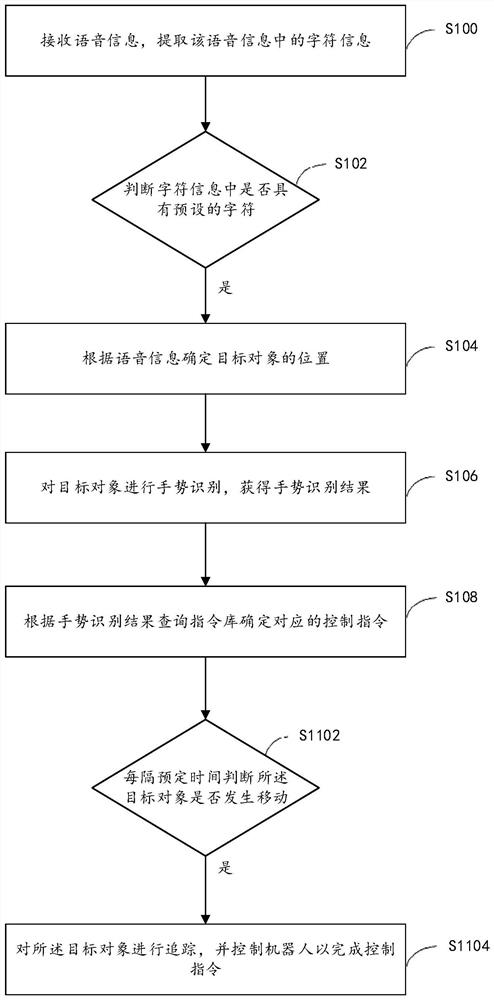
[0039]Step S100: Receive voice information and extract character information in the voice information.
[0040]Step S102: Determine whether or not the character information has a preset character, if yes, then go to step S104.
[0041]Step S104: Determine the location of the target object based on the voice information.
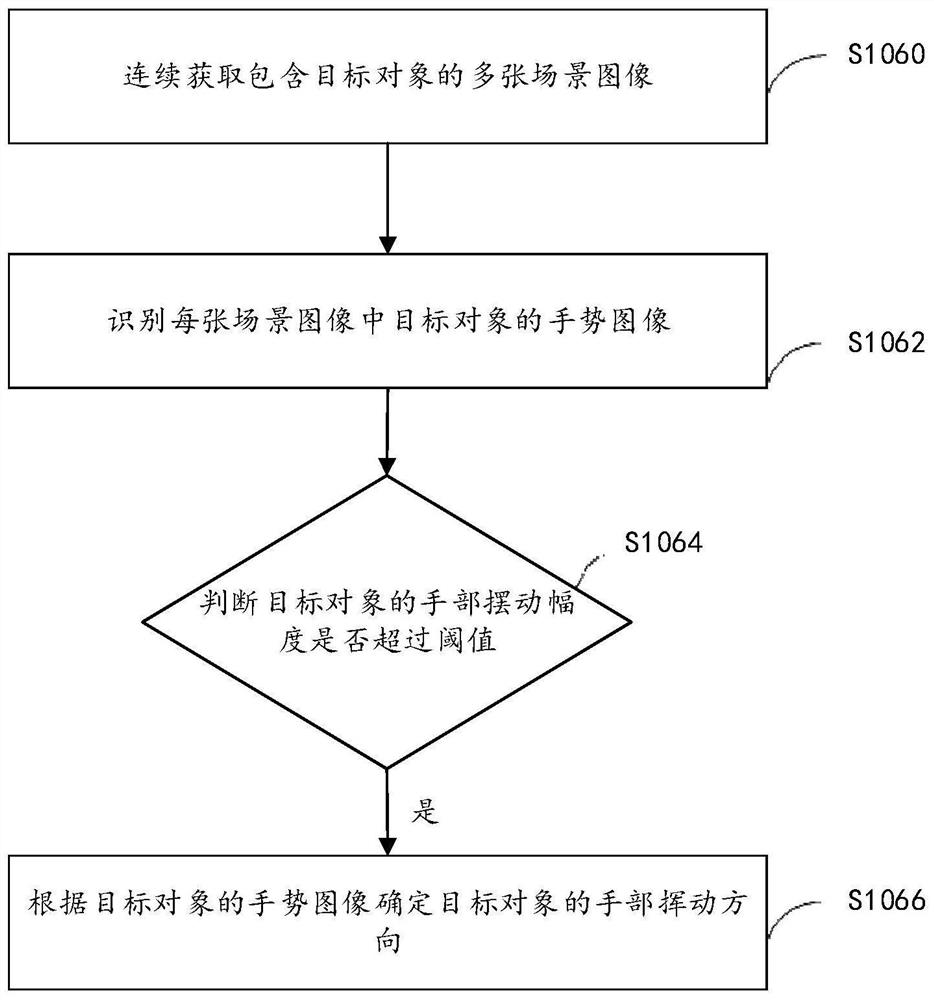
[0042]Step S106: Getting the target object to get the gesture recognition result.
[0043]Step S108: Determine the corresponding control command based on the gesture identification result query; where the instruction library contains a preset gesture recognition result and its corresponding control instructions.
[0044]Step S110: Control the performance of the robot based on the control command.
[0045]In step S100, the voice information can be received by a sound sensor or software identification module disposed on the robot. The sound sensor or software rec...
no. 2 example
[0078]Figure 6 A schematic block diagram of the robot control device 2 provided herein, it is understood that the device isFigure 1 to 5The method embodiment in which the method in which the method in the first embodiment can be performed, and the apparatus specifically described above, in order to avoid repetition, the detailed description is omitted herein. The apparatus includes at least one software function module that can be stored in a memory in a memory in a software or firmware (Firmware) or in the operating system (OPERATING SYSTEM, OS). Specifically, the apparatus includes: receiving the extraction module 200 for receiving voice information, character information in the voice information; determining module 202, is used to determine whether or not the character information has a preset character; determining module 204, for After determining the character information, the position of the target object is determined according to the voice information; gesture identificatio...
no. 3 example
[0085]Such asFigure 7 As shown, the present application provides an electronic device 3, including: processor 301 and memory 302, processor 301, and memory 302 communicate with each other through communication bus 303 and / or other formive connecting mechanism (not marked), The memory 302 stores a computer program executable by processor 301. When the device is calculated, the processor 301 executes the computer program, performing the first embodiment, and in any of the first embodiment. method.
[0086]The present application provides a non-transitory storage medium stored on a computer program that performs a first embodiment when the computer program is operated by the processor, and any of the preferred implementations of the first embodiment. Methods.
[0087]Among them, the storage medium can be implemented by any type of volatile or non-volatile storage device or a combination thereof, such as static random access memory (SRAM), electrical erasable programmable read-only memory (...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com