A single tree extraction method based on spectral clustering algorithm for lidar point cloud data
A spectral clustering algorithm and point cloud data technology, which is applied in the field of LiDAR point cloud data single-tree extraction based on spectral clustering algorithm, can solve the problem that the segmentation accuracy cannot be guaranteed, and achieve strong practical value, good surface and high-efficiency single-tree recognition effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
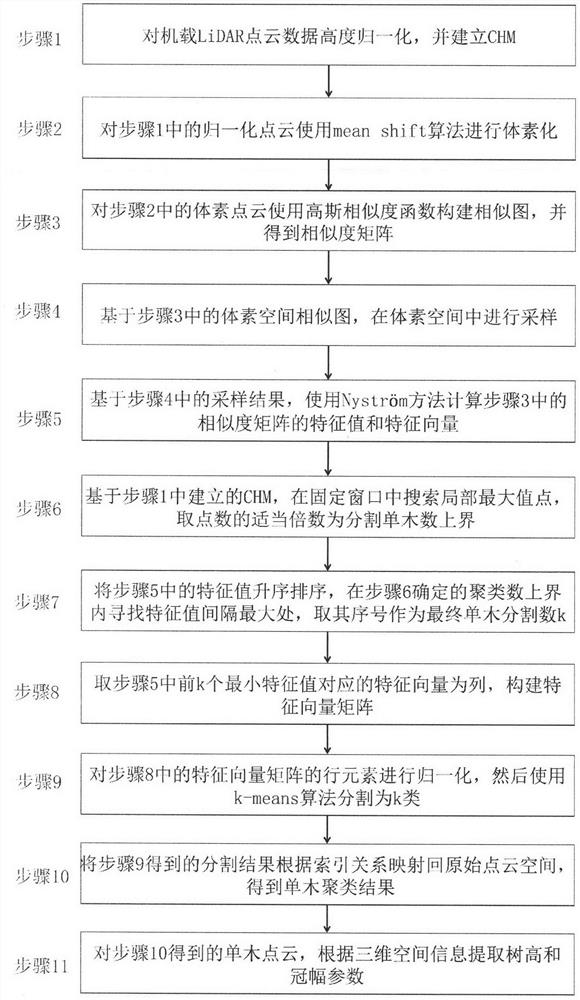
[0024] A single tree extraction method of LiDAR point cloud data based on spectral clustering algorithm, the implementation method is as follows figure 1 As shown, including the following operations:
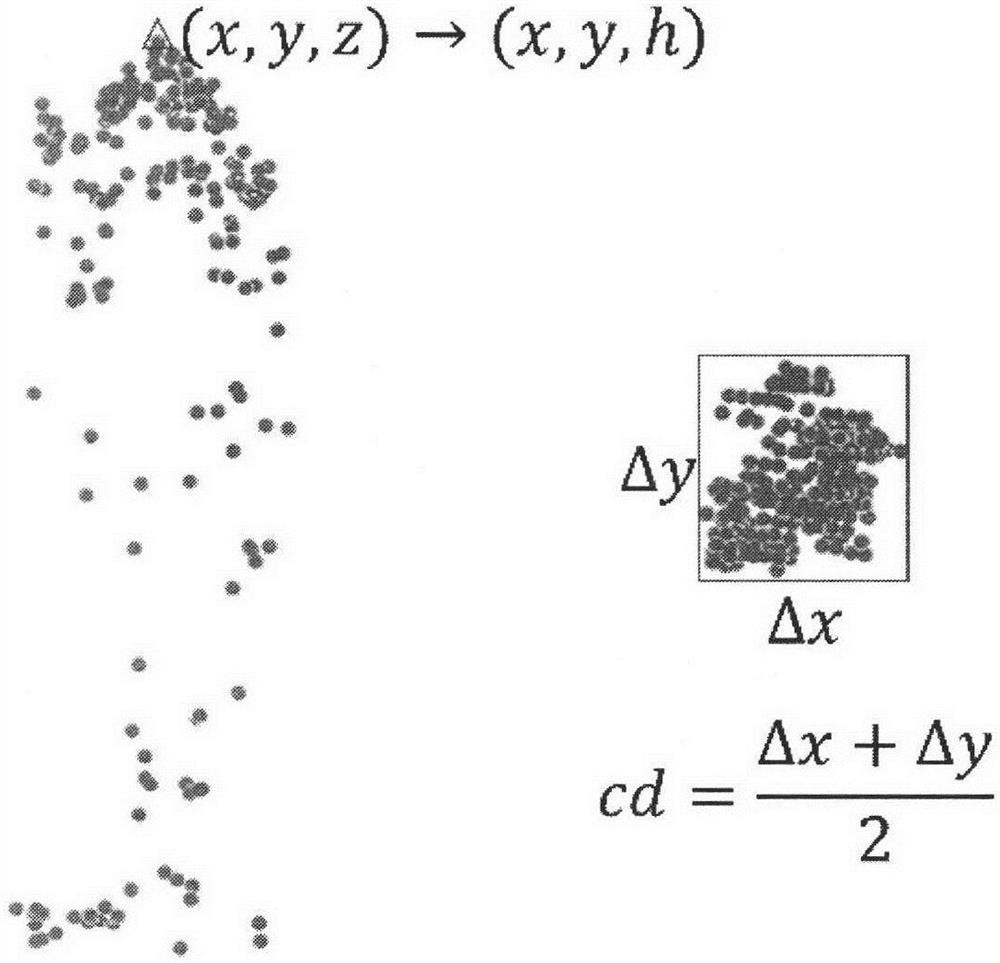
[0025] Step 1. Normalize the height information of the airborne LiDAR point cloud data and establish CHM;
[0026] Step 2, voxelize the normalized point cloud in step 1 using the mean shift algorithm;
[0027] Mean shift is a clustering algorithm that groups points by iteratively shifting each point towards a point shifted from the mean. It does not require assumptions about the data distribution or the number of clusters, and is a fast and efficient classifier. The present invention uses the mean shift method to complete the voxelization process, each voxel is represented by the clustering result of the mean shift, the position of the voxel is determined by the coordinate center of the cluster point, and the weight of the voxel is equal to the number of points therein.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com