Angle and velocity increment-based vehicle-mounted posture fine alignment system
A speed increment and alignment system technology, applied to measuring devices, instruments, etc., can solve problems such as poor alignment accuracy and long alignment time, and achieve the effects of high accuracy, low cost, and expanded work adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
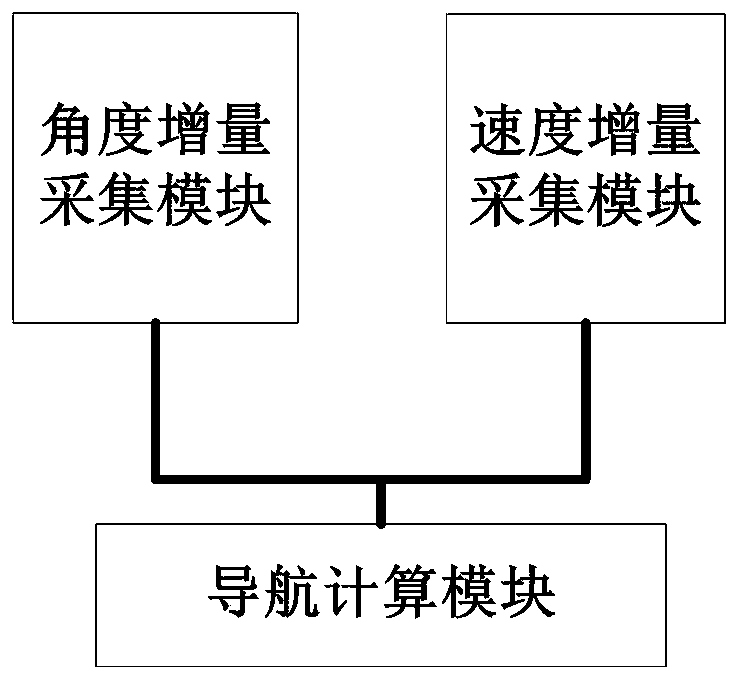
[0131] A specific embodiment of the present invention discloses a vehicle-mounted attitude fine alignment system based on angle and velocity increments, such as figure 1 As shown, it includes angle incremental acquisition module, speed incremental acquisition module and navigation calculation module. The output terminals of the angle incremental acquisition module and the speed incremental acquisition module are connected with the input terminals of the navigation calculation module.
[0132] The angle increment acquisition module is used to collect the angle increment of the vehicle's current three-axis deviation from the original three-axis in real time, and transmit it to the navigation calculation module.
[0133] The speed increment acquisition module is used to measure the speed increment of the vehicle along the original three axes in real time and transmit it to the navigation calculation module.
[0134] The navigation calculation module is used to perform error comp...
Embodiment 2
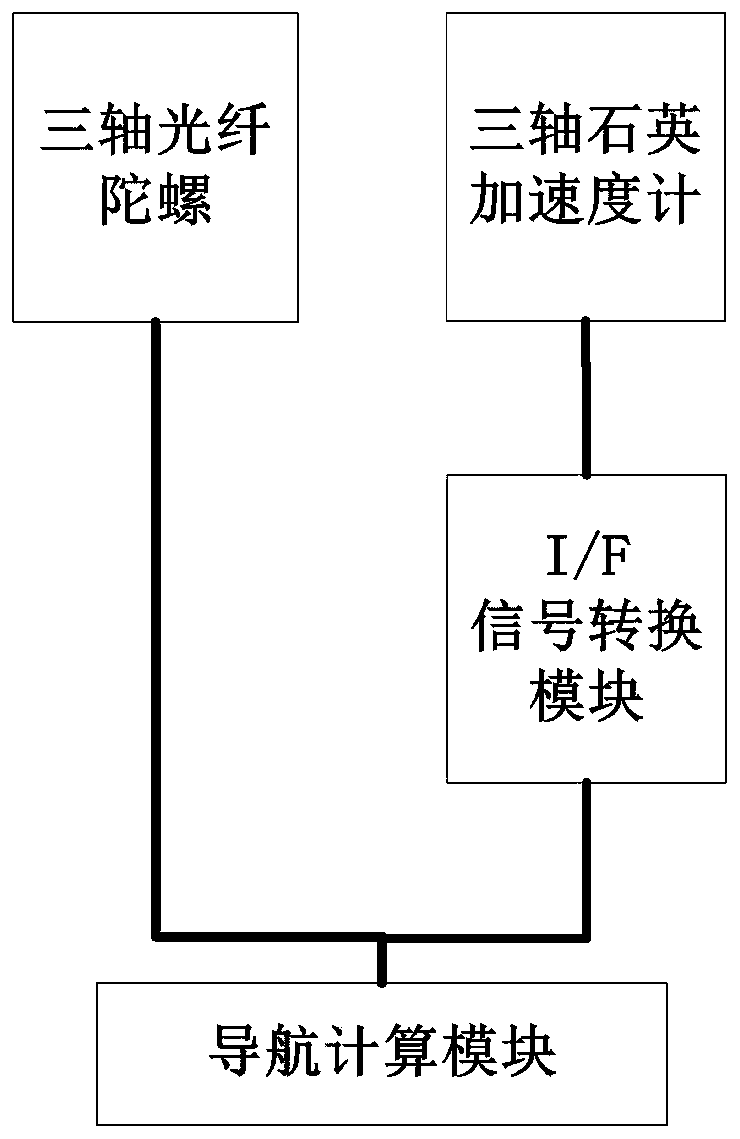
[0141] Optimizing on the basis of Embodiment 1, the system also includes an I / F signal conversion module, such as figure 2 As shown, it is between the speed increment acquisition module and the navigation calculation module.
[0142] The I / F signal conversion module is used to convert the electrical signal output by the speed increment acquisition module from analog to digital and transmit it to the navigation calculation module.
[0143] Preferably, the incremental angle acquisition module includes a three-axis fiber optic gyroscope. The three-axis fiber optic gyroscope is used to collect in real time the angle increment of the vehicle's current three-axis deviation from the original three-axis in the carrier coordinate system, convert it into a digital electrical signal, and transmit it to the navigation calculation module.
[0144] Preferably, the velocity increment acquisition module includes a three-axis quartz accelerometer. The three-axis quartz accelerometer is used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com