Automatic on-site and model image synchronization method based on Beidou GNSS and BIM
An automatic synchronization and model technology, applied in photogrammetry/video metrology, gyroscopic effect for speed measurement, gyroscope/steering sensing equipment, etc., can solve the problem of finding the position difficultly, and achieve the effect of meeting the requirements of accuracy and timeliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
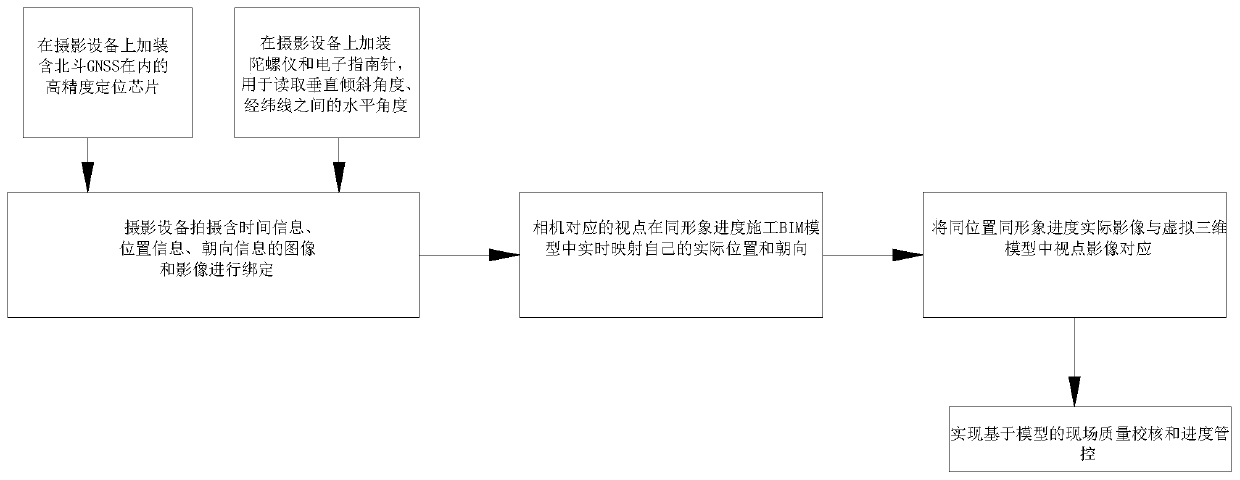
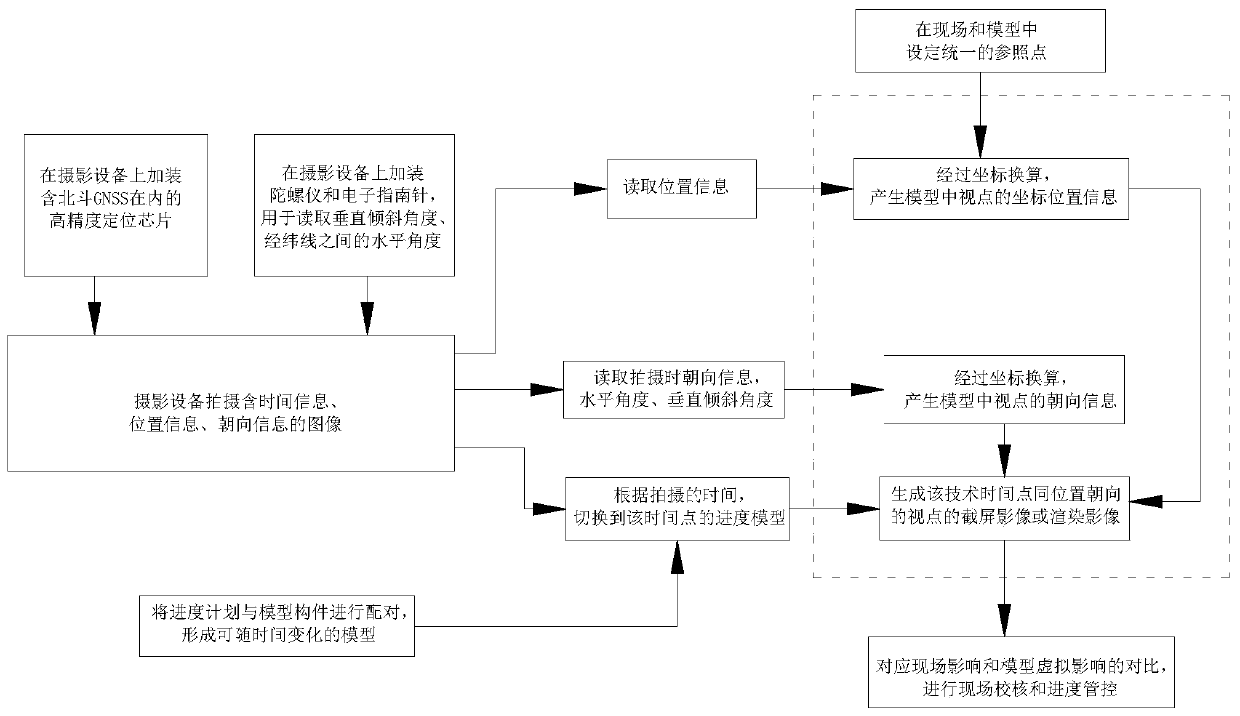
[0033] Such as figure 1 , 2 As shown, an automatic synchronization method of field and model images based on Beidou GNSS and BIM, the specific steps are as follows:
[0034] (1) Install high-precision positioning chips including Beidou GNSS, electronic compass, and gyroscope in the camera;
[0035] (2) When shooting an image, bind the image's position information, orientation vector information, time information and the image;
[0036] (3) The viewpoint corresponding to the camera maps its actual position and orientation in real time in the construction BIM model of the same image progress;
[0037] (4) Correspond the actual images of the same location and image progress with the viewpoint images in the virtual 3D model to realize model-based on-site quality verification and progress control.
[0038] Based on this embodiment, this embodiment can map images captured by GNSS positioning, electronic compass and gyroscope orientation with the construction BIM model in real tim...
Embodiment 2
[0048] The project of an international convention and exhibition center in a city along the coast of my country. The total construction area is about 100,000 square meters. In this project, the construction BIM model of the project was first established, including civil engineering, electromechanical, steel structure and site layout BIM models. Revit software is used to build models for civil engineering and electromechanical disciplines and site layout, Tekla software is used for steel structure disciplines, Rhino software is used for curtain wall disciplines, and the models of the four disciplines and site layout are assembled into one model using Revit software. Complete the establishment of the overall model. And when the model is established, the GNSS reference point position is reflected in the model.
[0049] After the model is established, according to the actual situation on site, match the model components with the schedule, analyze the progress of the project, for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com