Self-driving vehicle self-adaptive lane changing track planning method
A trajectory planning and automatic driving technology, which is applied to vehicle components, external condition input parameters, control devices, etc., can solve problems such as model failure, inconsistent driving environment, ignoring lane-changing vehicle adjustments, etc., to ensure safety, improve efficiency, The effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] A self-driving vehicle adaptive lane-changing trajectory planning method, the content of the present invention is described as follows:
[0029] 1. Trajectory planning module
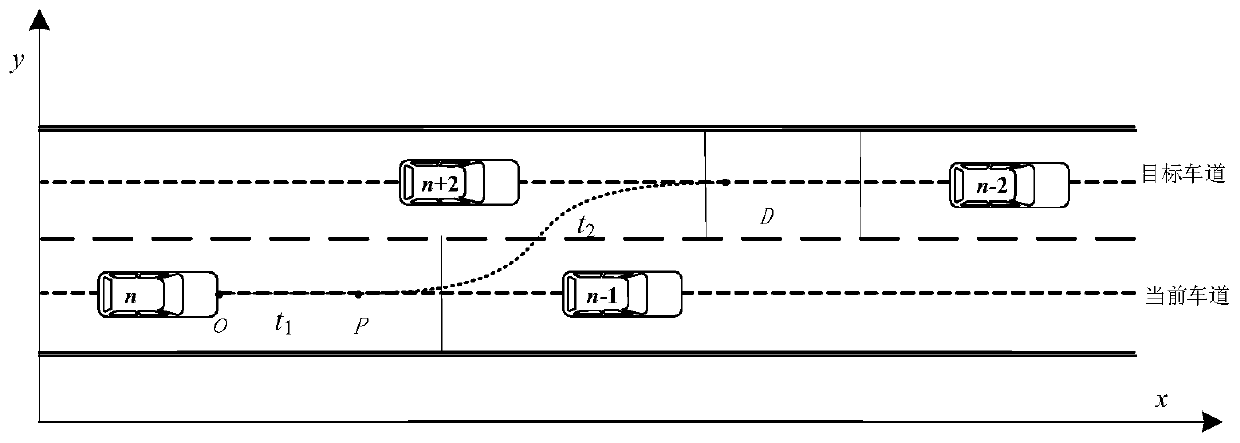
[0030]The lane-changing decision-making module of autonomous driving vehicles mainly includes three parts: optimal trajectory algorithm, collision avoidance algorithm and trajectory decision-making. Among them, the optimal trajectory algorithm is used to calculate the optimal trajectory under the condition of given comfort weight parameters; the collision avoidance algorithm determines the safety constraints of the vehicle lane change, and the trajectory decision algorithm uses the safety constraints to judge the vehicle’s optimal trajectory according to the location of the vehicle lane change. The safety of the optimal trajectory is realized, and the adjustment of the optimal lane-changing trajectory is realized, so that the lane-changing trajectory is more suitable for the lane-changing environ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com