An integrated navigation method for crab pond automatic operation ships based on information fusion of low-precision GPS, laser ranging sensor and azimuth sensor
An azimuth sensor and laser ranging technology, applied in surveying and navigation, navigation, navigation calculation tools, etc., can solve the problems of large equipment investment, complex heading control algorithms, etc., to avoid collisions, improve stability and anti-interference ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
[0036] The invention proposes a combined navigation method for an automatic operation ship in crab ponds based on information fusion of low-precision GPS, a laser ranging sensor and an azimuth sensor, which is used to realize the navigation of the automatic operation ship in crab ponds. The technical solution adopted by the present invention to solve its technical problems comprises the following steps:
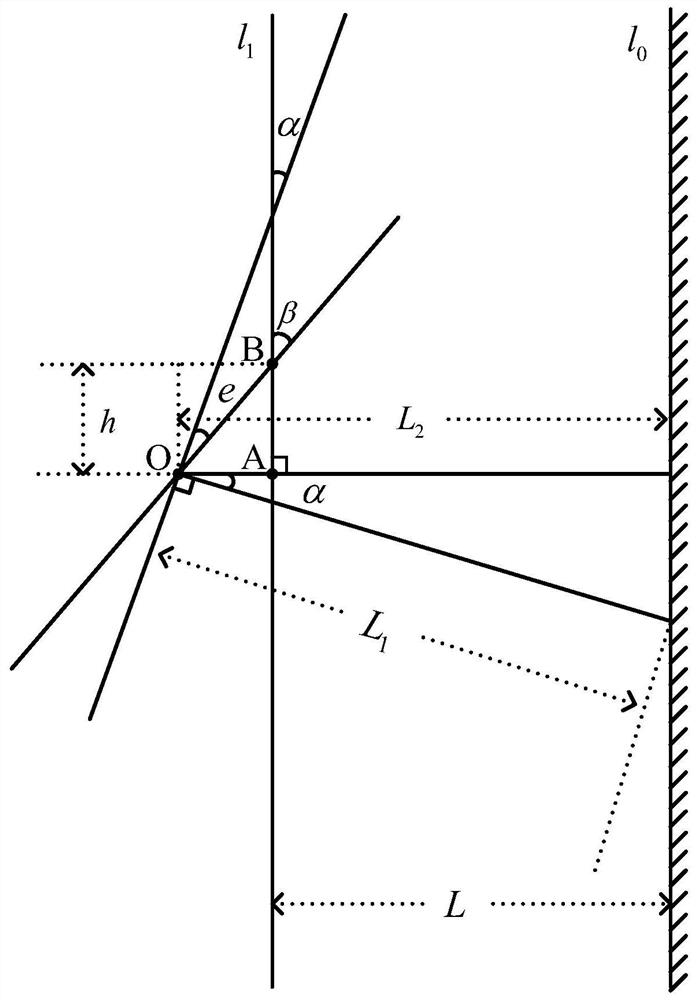
[0037] (j) Plan the target route of the operation ship, the distance L between the target route and the embankment, the target point of the next position and the position information of the turning point through the data of the GPS system, such as figure 1 shown. When the workboat travels to the relevant position, it starts to turn or switch the corresponding track line.
[0038] (k) Determining the current heading angle α of the workboat thr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com