RBF neural network adaptive control method for multiple single mechanical arms
An adaptive control and neural network technology, applied in the field of RBF neural network adaptive control of multi-single-arm manipulators, can solve the problems of explosion of computational complexity, low efficiency, and difficult control problems in reverse thrust control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described below in conjunction with specific embodiment:
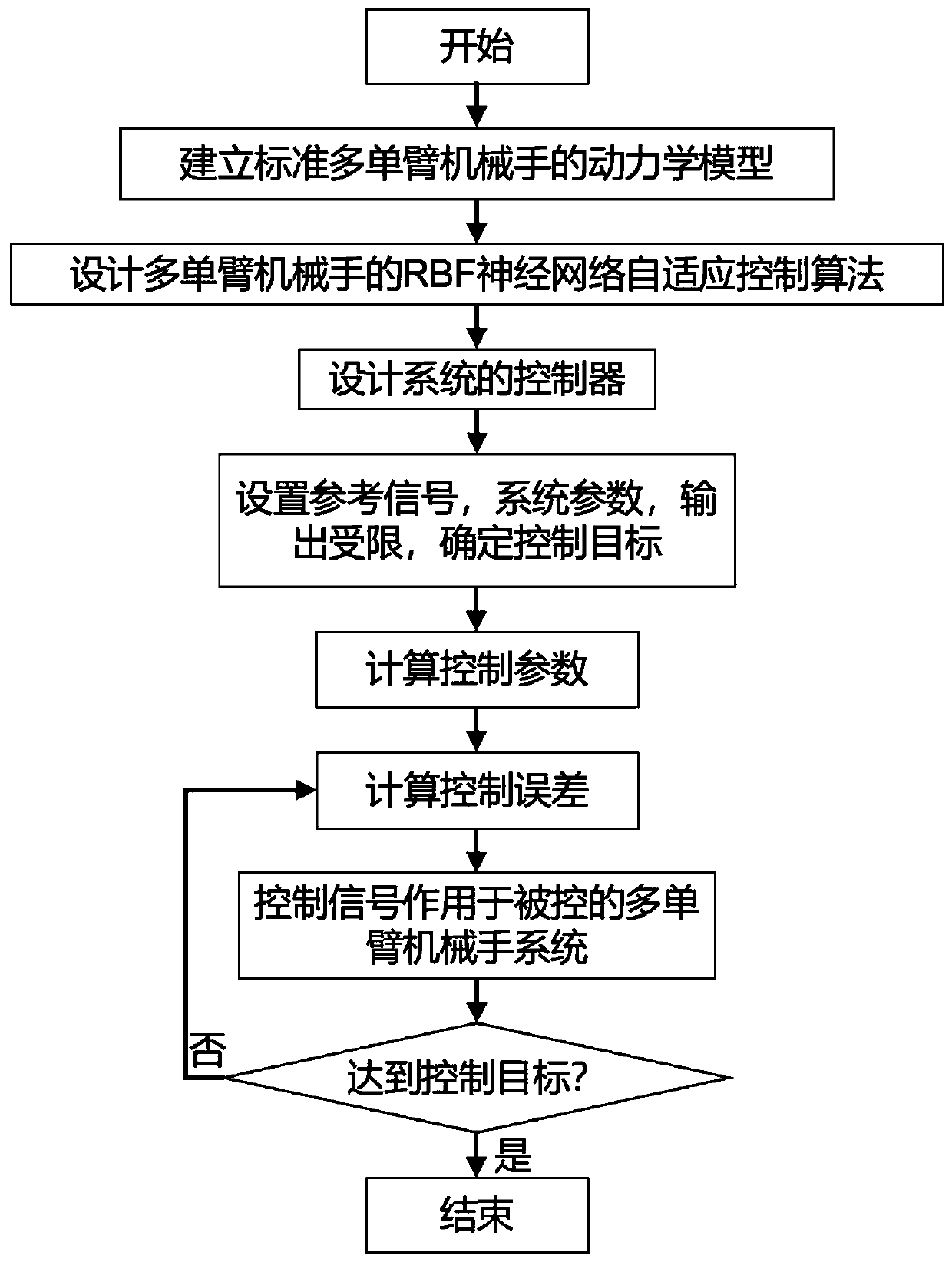
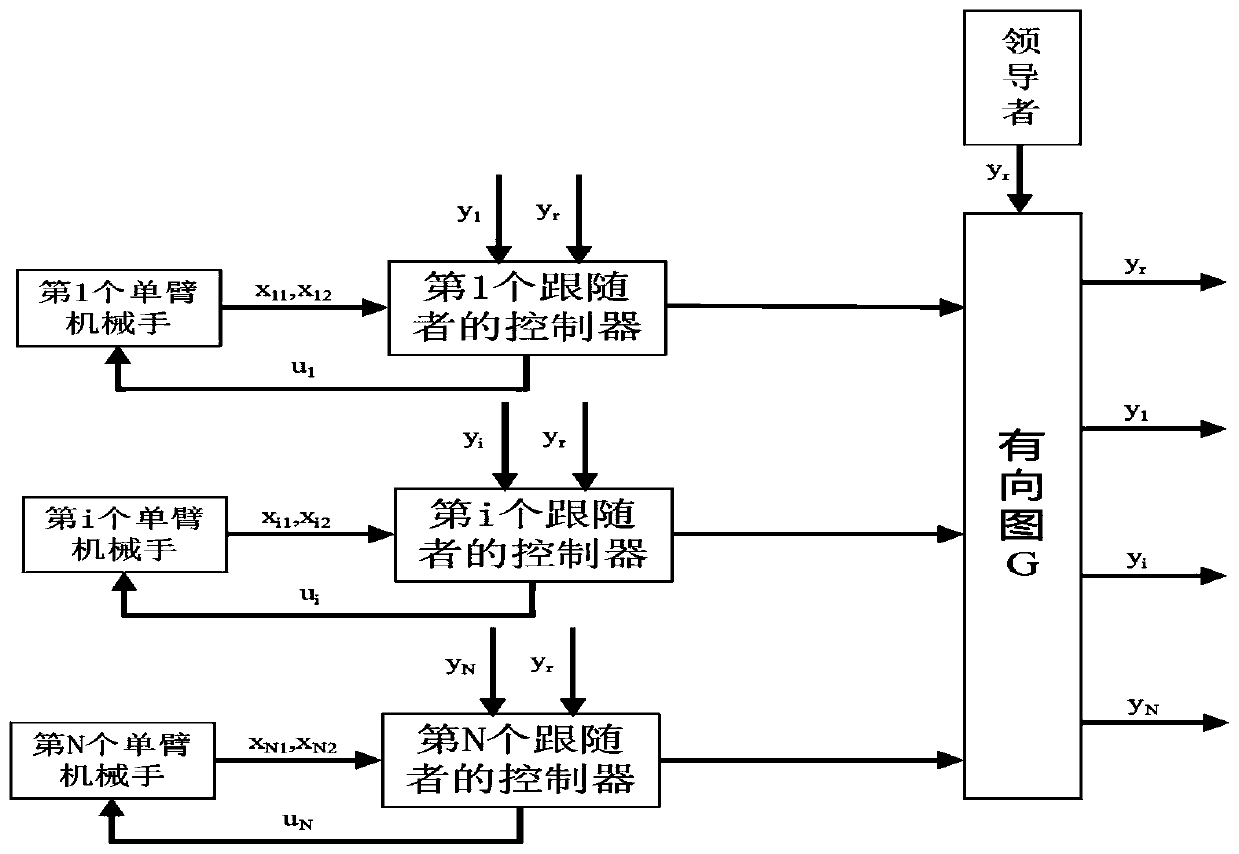
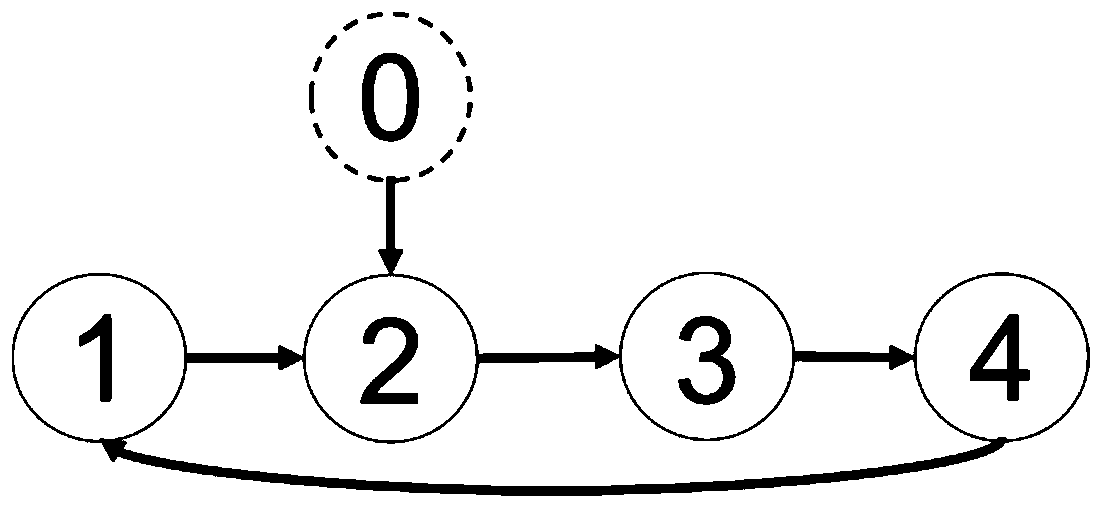
[0063] like figure 1 As shown, the RBF neural network adaptive control method of a multi-single-arm manipulator described in this embodiment is based on a multi-single-arm manipulator system containing a leader manipulator and n follower manipulators, and the leader manipulator is marked as 0, The follower robot arm is marked as v={1,2,…N}; the specific steps are as follows:
[0064] S1: Establish a standard multi-arm manipulator dynamic model:
[0065]
[0066] Among them, q i Indicates the angle of the mobile manipulator joint, Indicates the acceleration of the mobile manipulator, M i Indicates moment of inertia, m i Indicates the mass of the mobile manipulator, g indicates the acceleration of gravity, l i Indicates the connecting rod length, u i Denoted as the control input of the system, b i Indicates an unknown parameter.
[0067] S2: Establish graph theory...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com