Adcp assisted sins navigation method for manned deep submersible
A technology of a manned submersible and a navigation method, applied in the field of high-precision underwater navigation and positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0065] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
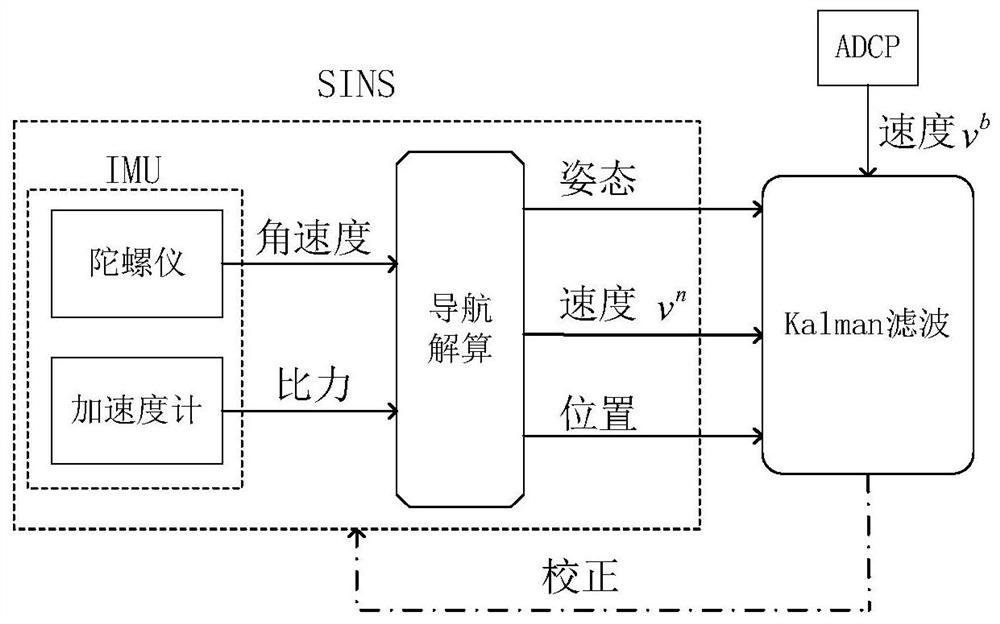
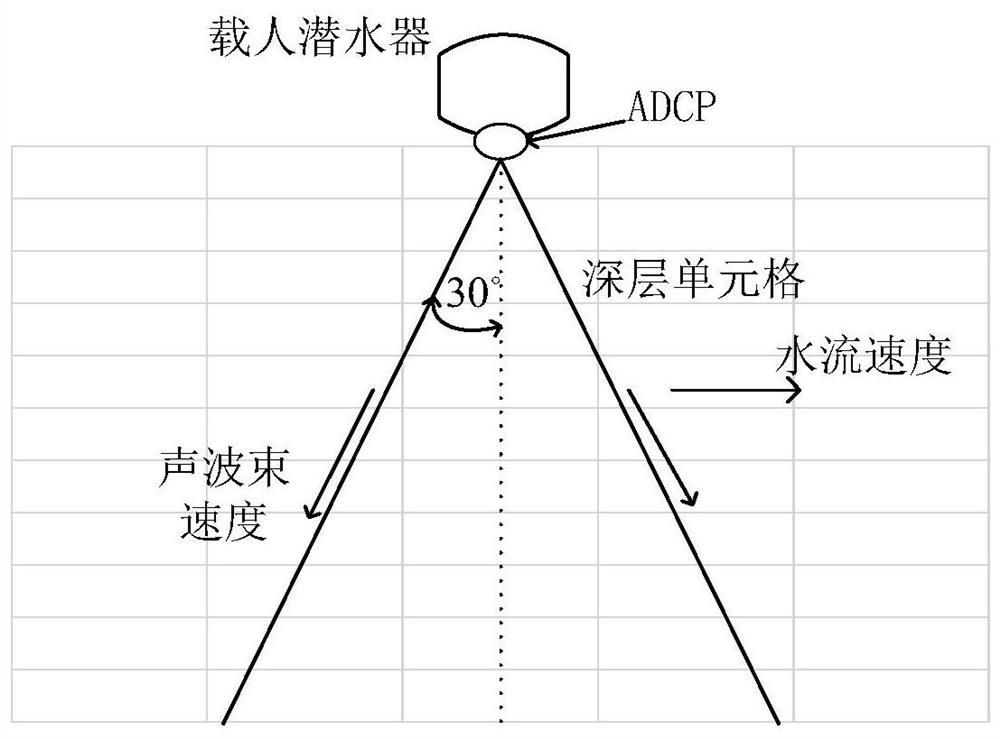
[0066] The present invention uses the ADCP installed at the bottom of the manned submersible to measure the velocity of the manned submersible relative to the water flow without considering the acoustic positioning system, and further uses the overlapping ADCP measurements to deduce the ground velocity and the water flow velocity profile at different depths ; Through the kalman filter technology, the obtained ground speed and the navigation parameters output by SINS are fused together to form a speed matching integrated navigation to suppress the divergence of SINS positioning errors, so as to realize the full autonomy of the deep-diving manned submersible in the process of diving / surfacing high-precision navigation and positioning. Such as figure 1 Shown, a kind of deep submersible manned submersible ADCP assisted SINS navigation method of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com