Real-time calibration method for magnetic sensor
A technology of a magnetic sensor and a calibration method, applied in the field of sensor calibration, can solve the problems of high cost, high complexity, and large amount of calculation of batch data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0064] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
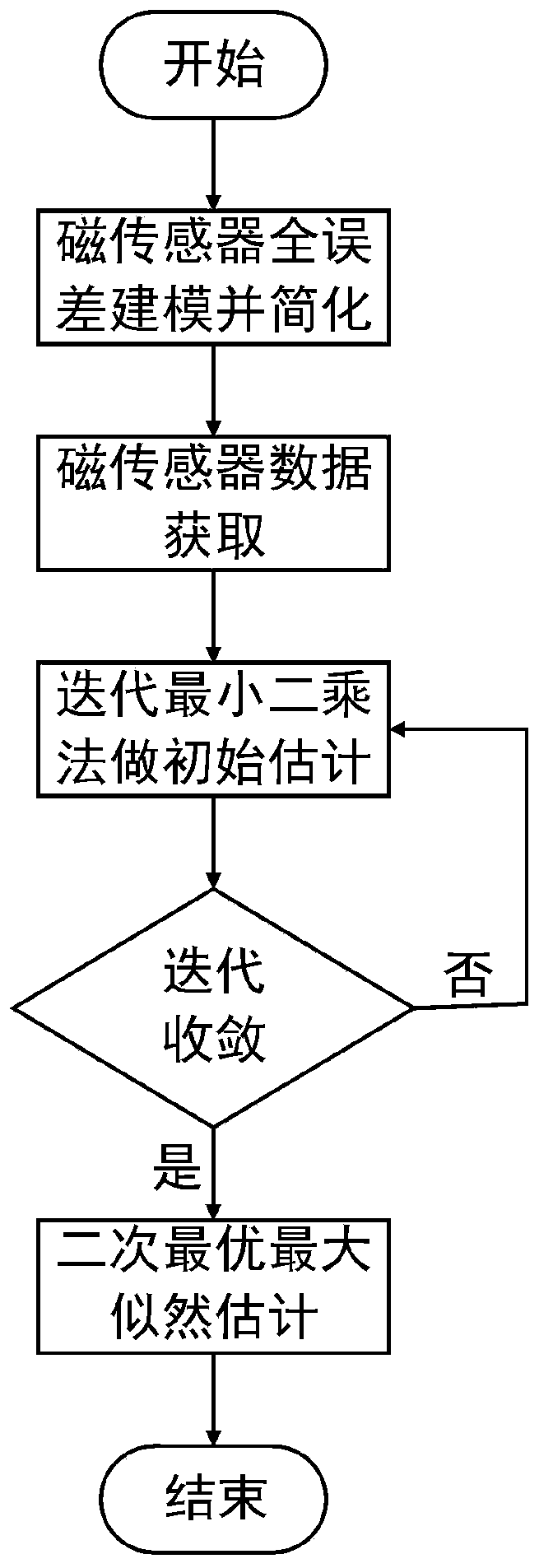
[0065] refer to figure 1 As shown, the present invention discloses a real-time calibration method for a magnetic sensor, comprising the following steps:
[0066] (1) Establish and integrate the full error model of magnetic sensor measurement to obtain a simplified measurement model;
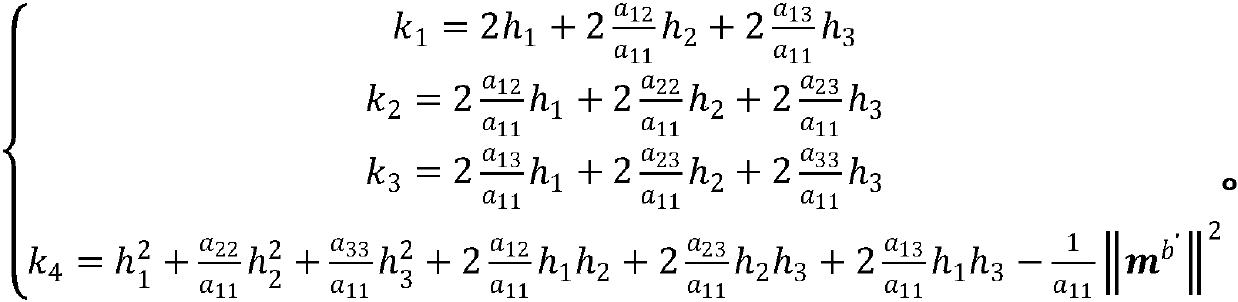
[0067] The full error model of the magnetic sensor is:
[0068]
[0069] in is the measured magnetic sensor data, P=||m n ||S M C NO C SI , h m = S M C NO b HI +b M =[h 1 h 2 h 3 ] T , S M is the proportional error, C NO is the non-orthogonal error, C SI is the soft magnetic interference coefficient matrix, is the attitude transfer matrix of the navigation system to the ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com