


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Coaxial multi-rotor simulation method and system
A simulation method and multi-rotor technology, applied in the field of helicopter simulation, can solve the problem of difficult balance between coaxial multi-rotor accuracy and real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
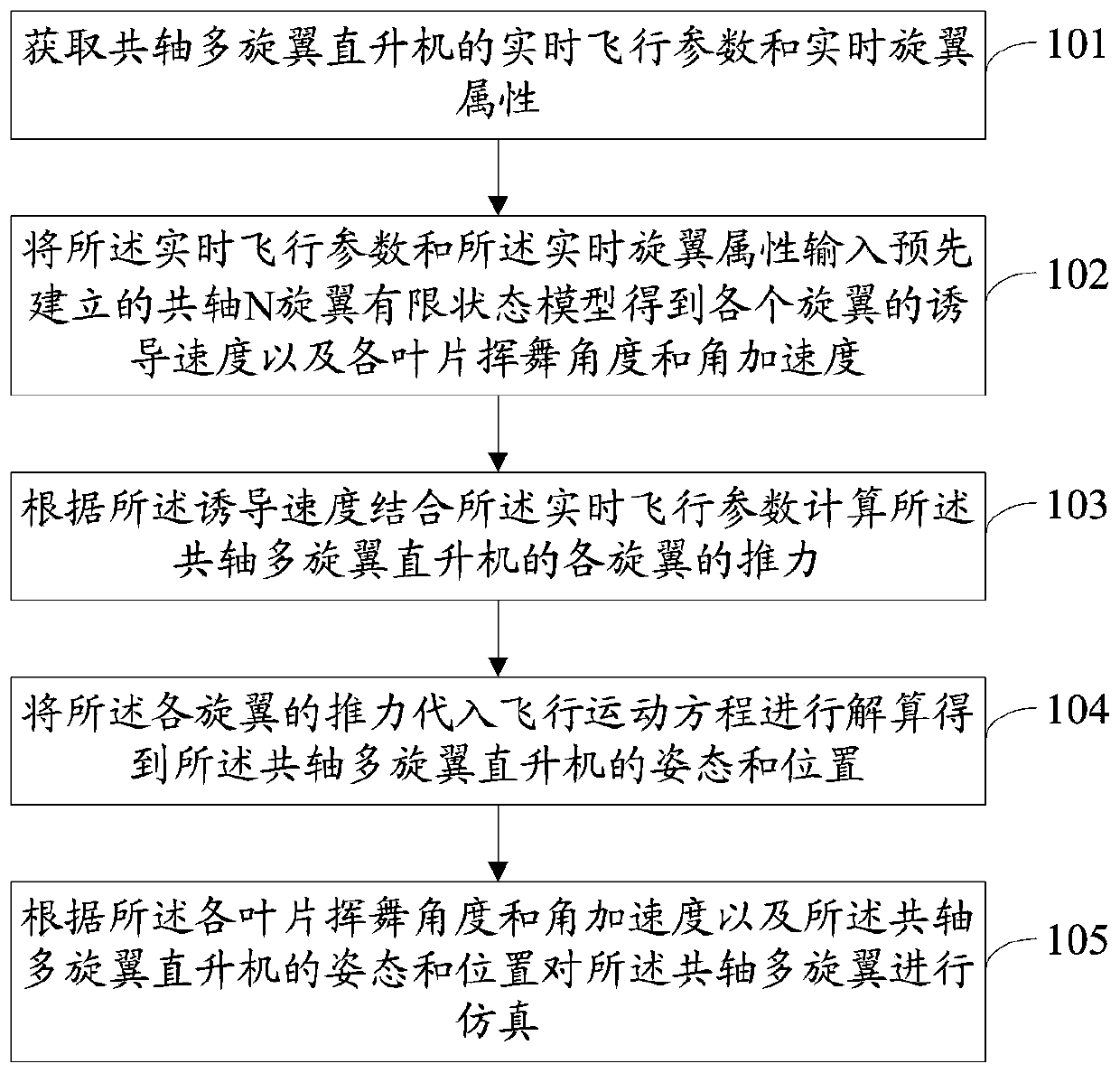
[0060] figure 1 It is a method flow chart of the coaxial multi-rotor simulation method in Embodiment 1 of the present invention.
[0061] see figure 1 , the coaxial multi-rotor simulation method, including:
[0062] Step 101: Obtain real-time flight parameters and real-time rotor properties of the coaxial multi-rotor helicopter;
[0063] Step 102: Input the real-time flight parameters and the real-time rotor attributes into the pre-established coaxial N-rotor finite state model to obtain the induced speed of each rotor and the flapping angle and angular acceleration of each blade;
[0064] Step 103: Calculate the thrust of each rotor of the coaxial multi-rotor helicopter according to the induced speed combined with the real-time flight parameters;
[0065] Step 104: Substituting the thrust of each rotor into the flight motion equation for solution to obtain the attitude and position of the coaxial multi-rotor helicopter;
[0066] Step 105: Simulate the coaxial multi-rotor ...
Embodiment 2
[0083] This embodiment 2 is a further optimization of the embodiment.
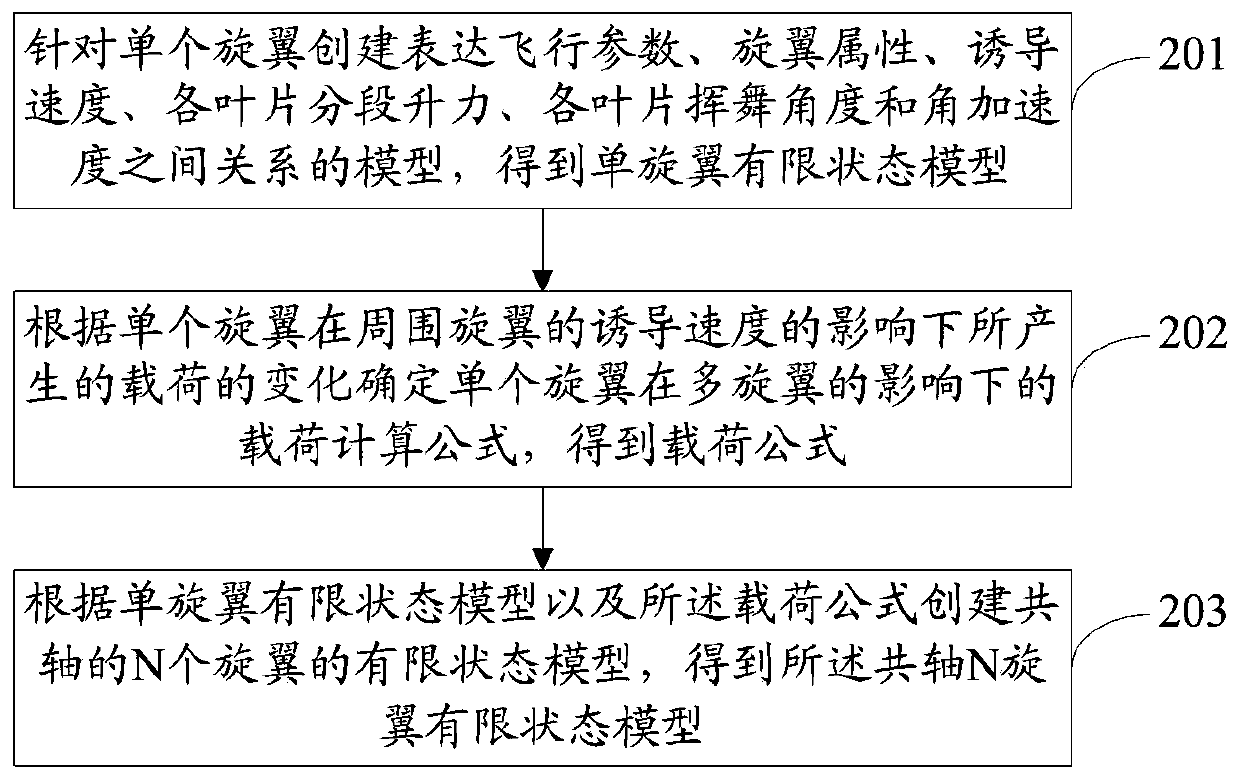
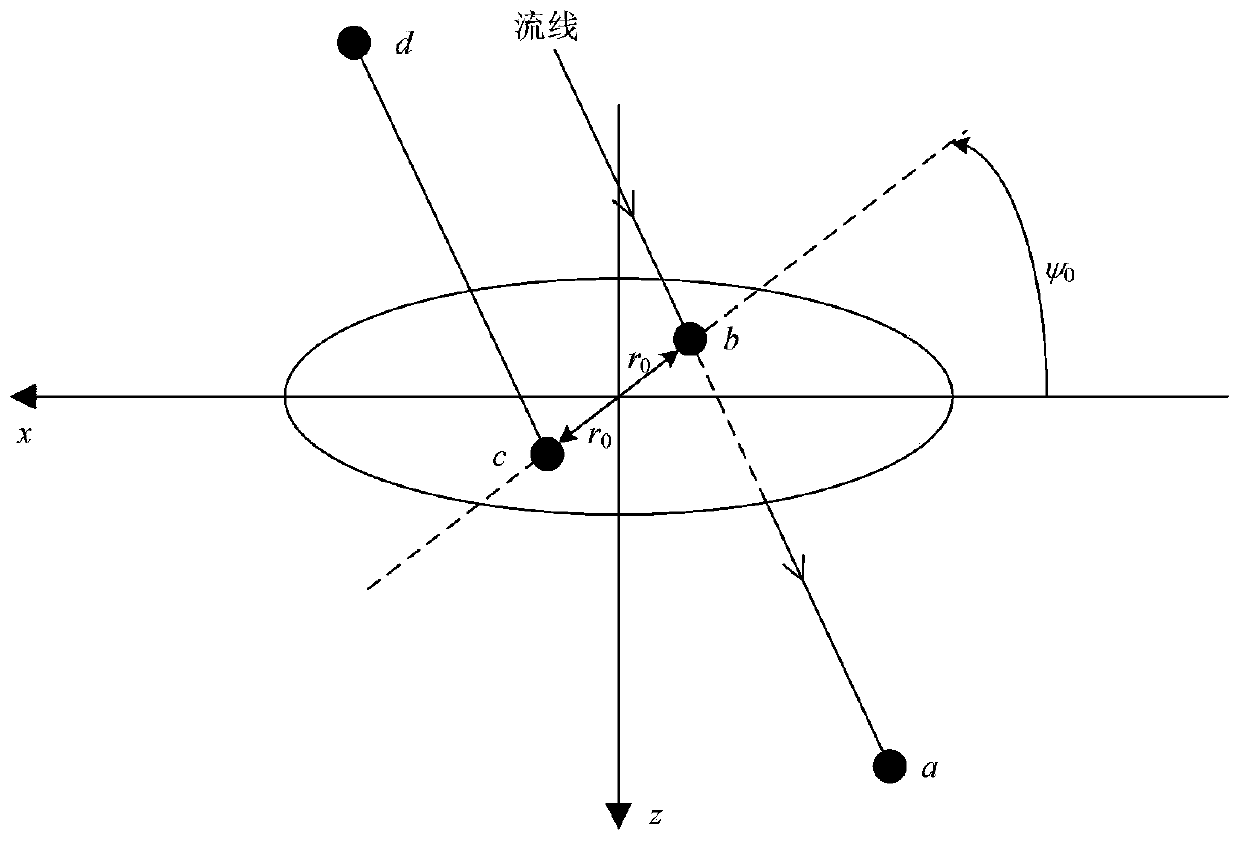
[0084] A finite state model of a coaxial N-rotor is established. The finite state model of coaxial N-rotors is used to calculate the induced velocity of each rotor as well as the flapping angle and angular acceleration of each blade. The input quantities of the coaxial N-rotor finite state model include flight parameters and rotor properties. Specifically: the attitude of the coaxial multi-rotor helicopter, flight motion parameters, throttle amount, total moment of each rotor, lateral and longitudinal periodic moment change, etc. Throttle volume is used to calculate RPM. The pitch can be calculated from the total rotor moment, lateral and longitudinal cyclic torque. The establishment of the finite state model of the coaxial N-rotor includes two processes: 1) the determination of the mixing velocity of the induced velocity of the full flow field of the rotor; 2) the determination of the finite state mode...
Embodiment 3
[0151] Figure 5 It is a system structure diagram of the coaxial multi-rotor simulation system in Embodiment 3 of the present invention.
[0152] see Figure 5 , the coaxial multi-rotor simulation system includes:
[0153] An acquisition module 501, configured to acquire real-time flight parameters and real-time rotor attributes of the coaxial multi-rotor helicopter;
[0154] The input module 502 is used to input the real-time flight parameters and the real-time rotor attributes into the pre-established coaxial N rotor finite state model to obtain the induced speed of each rotor and the flapping angle and angular acceleration of each blade;
[0155] The thrust calculation module 503 is used to calculate the thrust of each rotor of the coaxial multi-rotor helicopter according to the induced speed combined with the real-time flight parameters;
[0156] The attitude position calculation module 504 is used to substitute the thrust of each rotor into the flight motion equation t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com