Bionic flapping-wing robot driven by flexible piezoelectric fibers
A flexible piezoelectric and robot technology, which is applied in the direction of helicopters, motor vehicles, aircraft, etc., can solve the problems of insufficient flight power, insufficient flight power, and non-reversible movement of flapping-wing robots, so as to reduce energy consumption, improve flight power, and reduce energy consumption. The effect of small flight resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in detail below in conjunction with specific embodiments.
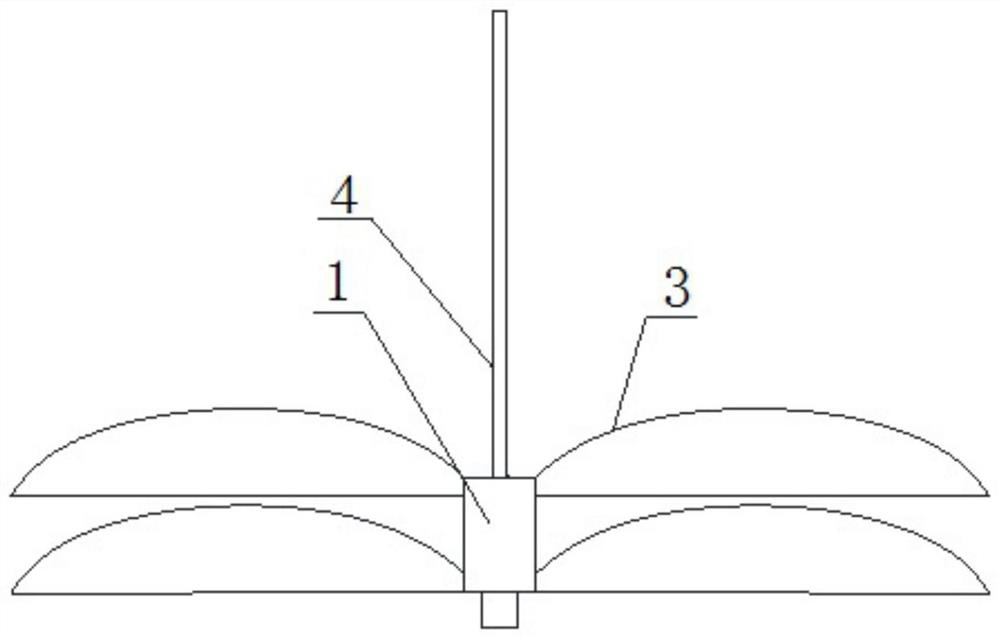
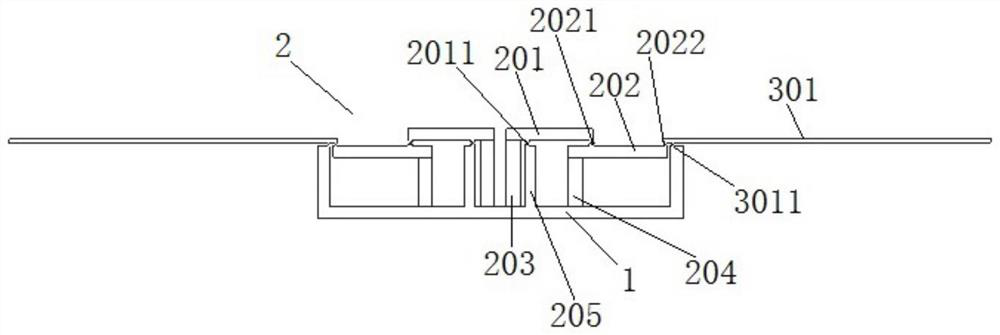
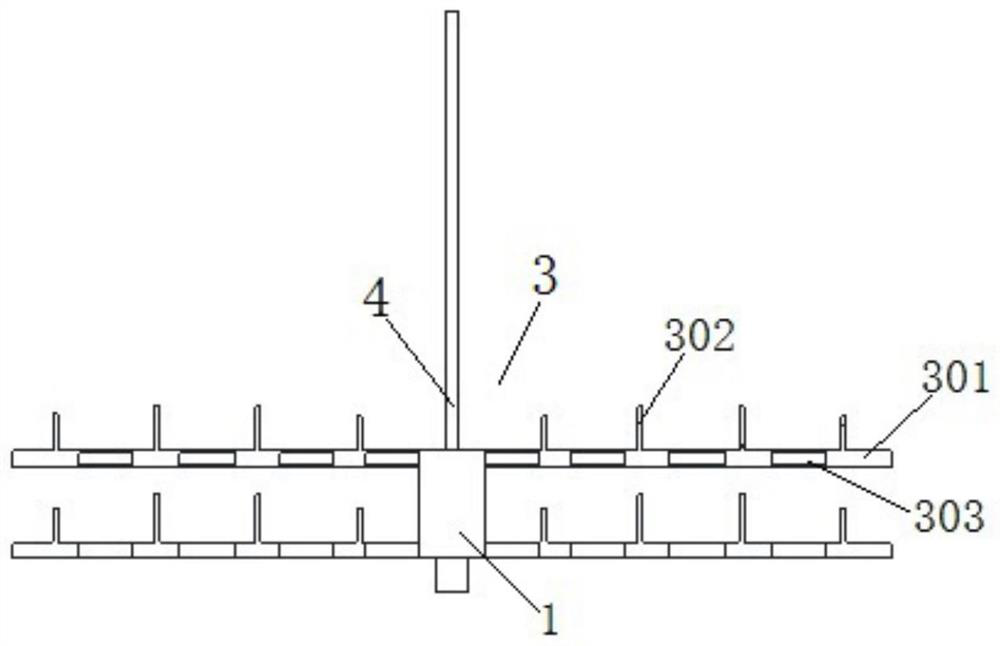
[0031] A bionic flapping wing robot driven by flexible piezoelectric fibers, such as figure 1 and figure 2 As shown, it includes a fuselage 1, a drive-amplifying mechanism 2 and wings 3, and the wings 3 are mounted on the fuselage in pairs, and there are two pairs of wings 3 on the fuselage, and each wing includes ribs 301 and fins 302, each drive-amplification mechanism 2 corresponds to a wing 3, the drive-amplification mechanism 2 is located in the fuselage 1, the drive-amplification mechanism 2 includes three stages of series levers, the first stage lever 201 and the second stage of the drive-amplification mechanism The input ends of the first-level levers 202 are respectively provided with respective piezoelectric actuators, the output ends of the first-level levers 201 and the second-level levers 202 are hinged by a flexible hinge 2021, and the hinge point is used ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com