Integrated wearable joint training device
A technology for training devices and joints, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as shortening service life, functional problems, inconvenience in use, etc., to reduce unnecessary damage, prolong service life, and have strong mobility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
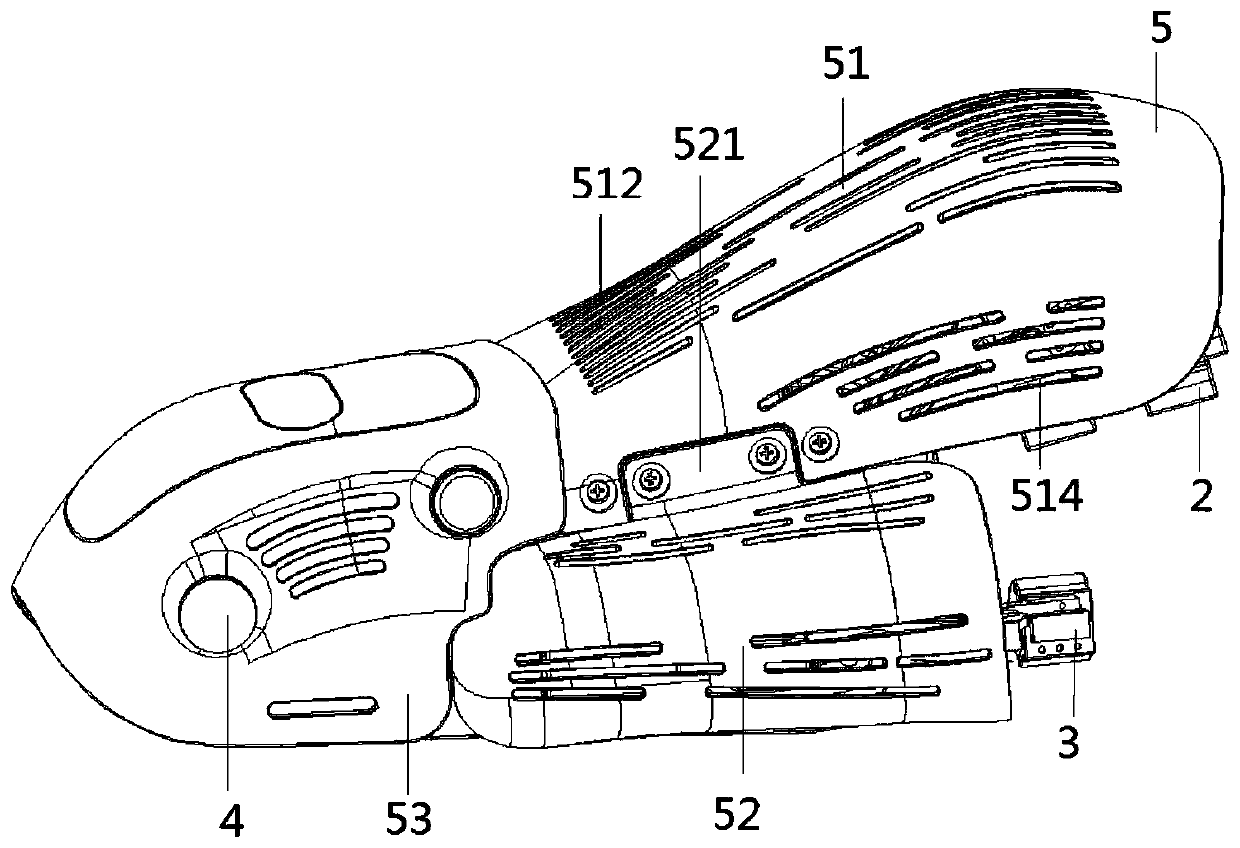
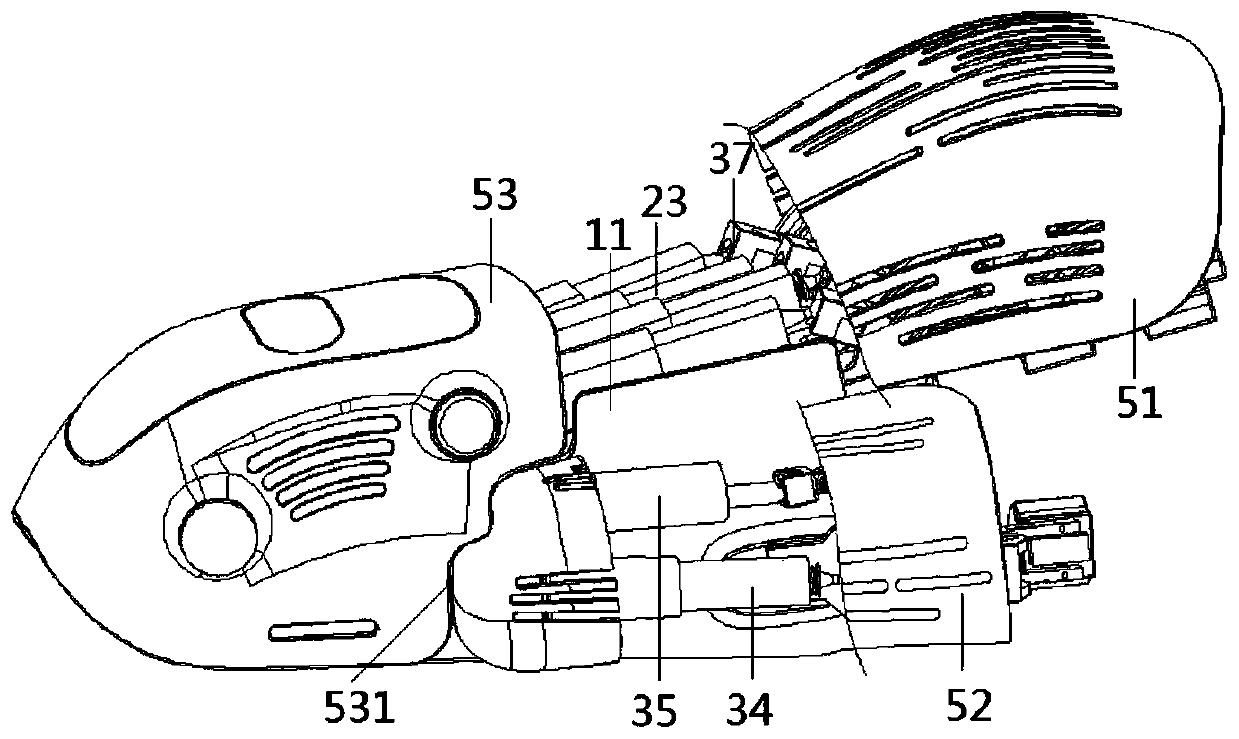
[0038] As an embodiment of the present invention, the edge of the rear protective shell 53 near the end of the outer protective shell 51 and the side protective shell 52 is inwardly recessed to form an avoidance edge 531 for easy installation of the outer protective shell 51 and the side protective shell 52, the outer protective shell 51. The side protective shell 52 and the rear protective shell 53 can be disassembled independently, which is convenient for the replacement and maintenance of product parts.
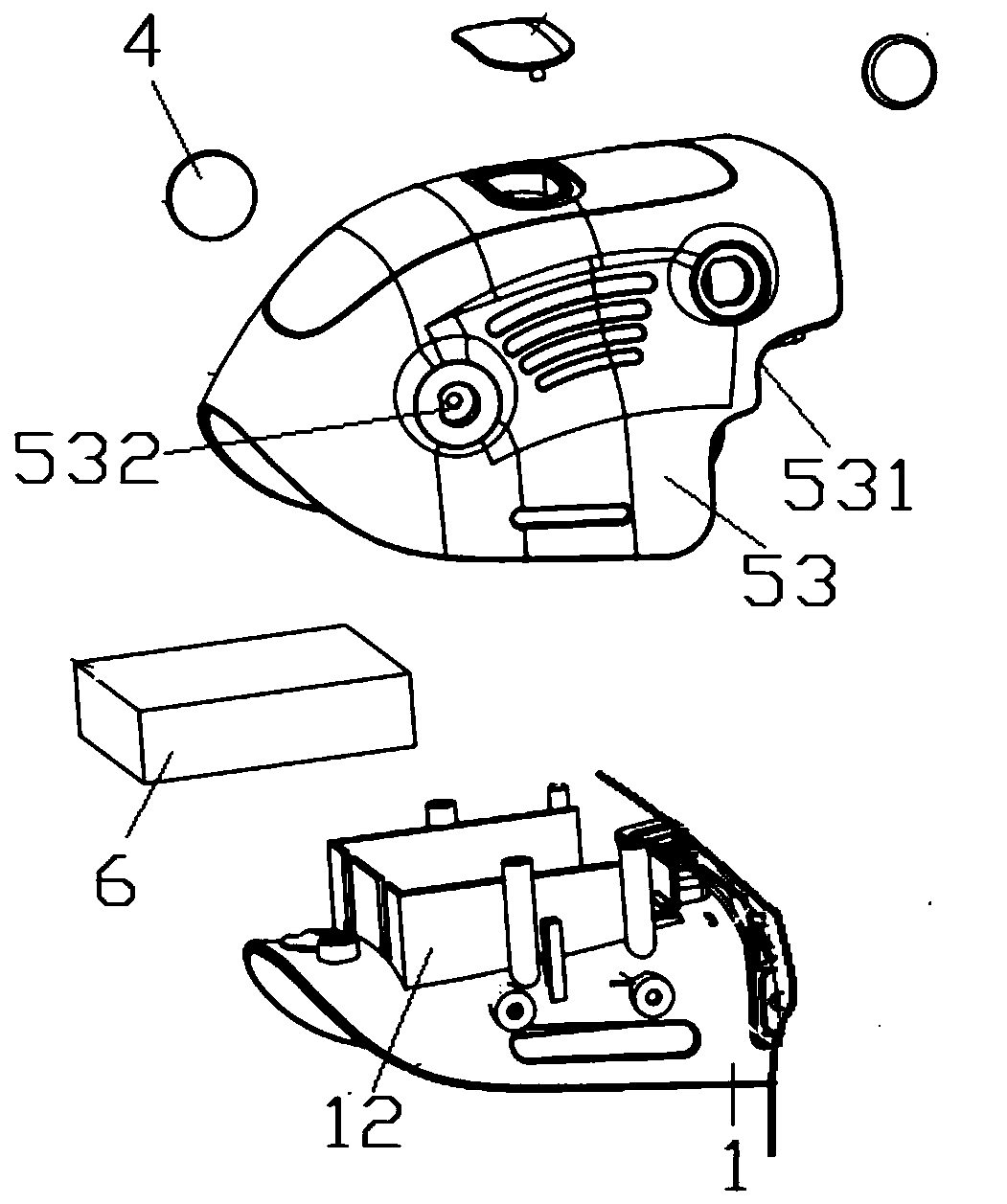
[0039] The rear shell 53 is concavely provided with a fixing groove 532 for fixing the magnetic ball 4, and one end of the magnetic ball 4 is embedded in the fixing groove 532. In this embodiment, the magnetic ball 4 is embedded in one end of the fixing groove 532 and the rear protective shell. 53 are further fixed by screws to ensure that the magnetic ball 4 is firmly installed on the housing 5 .
[0040] The rear shell 53 is provided with a charging interface 533 connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com