


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Tracking control method and device and mobile terminal
A mobile terminal, tracking control technology, applied in the tracking field, can solve the problem of low positioning accuracy, achieve the effects of simple algorithm, low positioning accuracy, strong practicability and ease of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
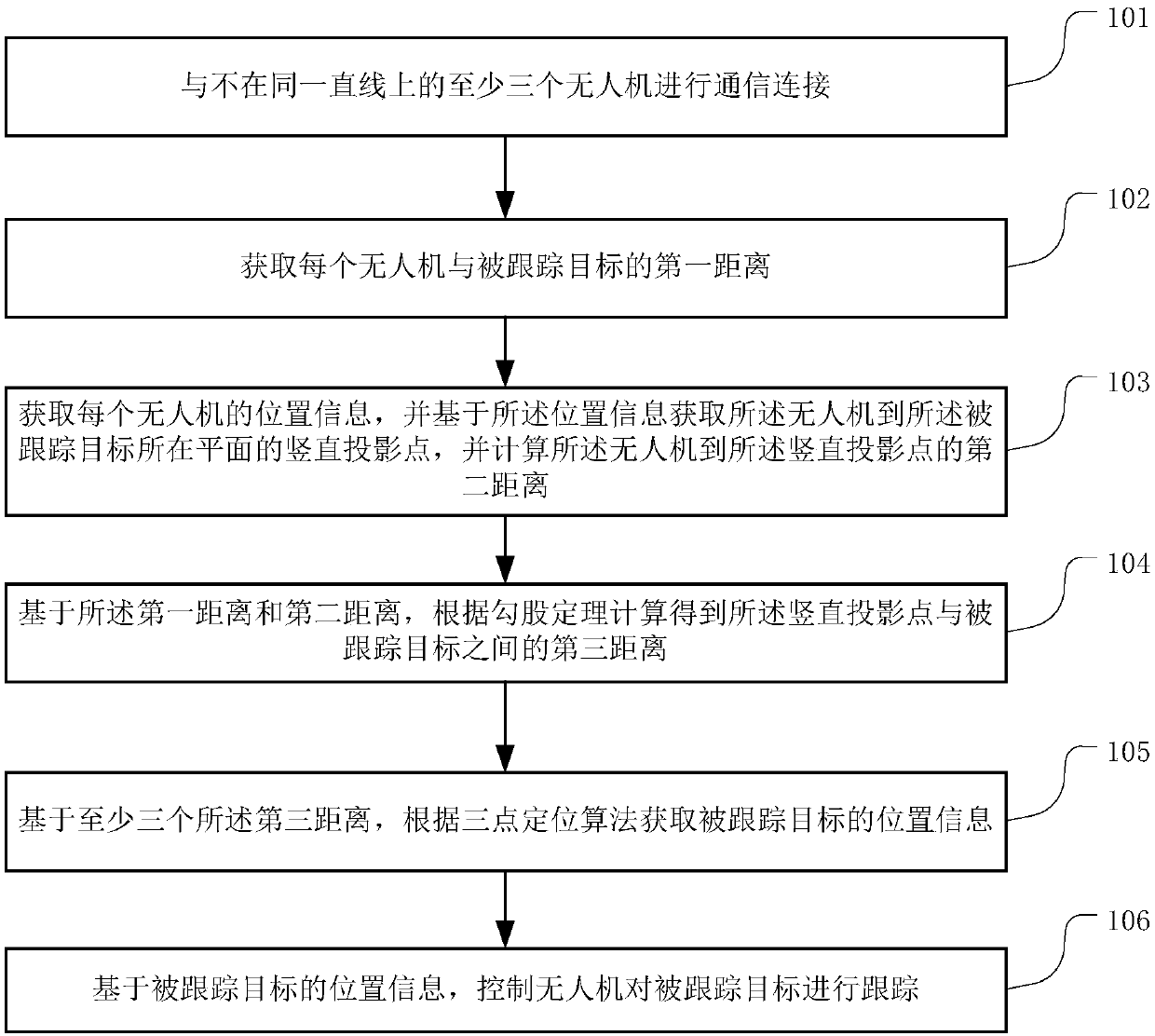
[0058] figure 1 A schematic flow chart showing the implementation of the tracking control method provided by Embodiment 1 of the present invention is shown. The execution subject of the embodiment of the present invention is a mobile terminal. like figure 1 As shown, the tracking control method may specifically include the following steps:
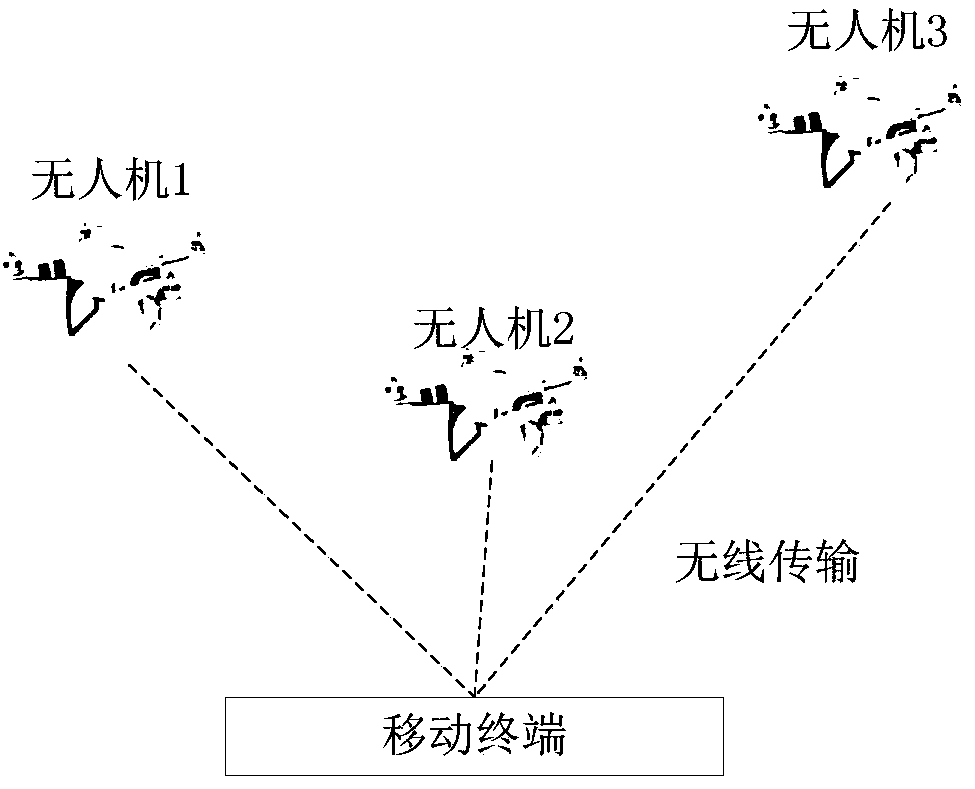
[0059] Step S101: Communicating with at least three drones that are not on the same straight line.
[0060] Among them, the fact that the UAVs are not on the same straight line is to meet the conditions of the three-point positioning principle. The mobile terminal communicates with the UAV separately, such as figure 2 As shown, the way of communication connection is not limited here.
[0061] Step S102: Obtain the first distance between each UAV and the tracked target.
[0062] Optionally, as a preferred embodiment of the embodiment of the present invention, such as image 3 As shown, the acquisition of the first distance between e...
Embodiment 2
[0084] Please refer to Figure 7 , which shows a structural block diagram of the tracking control device provided by Embodiment 2 of the present invention. The tracking control device 70 includes: a communication module 71 , a first acquisition module 72 , a first calculation module 73 , a second calculation module 74 , a second acquisition module 57 and a control module 77 . Among them, the specific functions of each module are as follows:
[0085] A communication module 71, configured to communicate with at least three unmanned aerial vehicles that are not on the same straight line;
[0086] The first acquiring module 72 is used to acquire the first distance between each drone and the tracked target;
[0087] The first calculation module 73 is used to obtain the position information of each drone, and obtain the vertical projection point of the drone to the plane where the tracked target is located based on the position information, and calculate the The second distance f...
Embodiment 3
[0102] Figure 8 It is a schematic diagram of the mobile terminal provided by Embodiment 3 of the present invention. like Figure 8As shown, the mobile terminal 8 of this embodiment includes: a processor 80, a memory 81, and a computer program 82 stored in the memory 81 and operable on the processor 80, such as a tracking control method program. When the processor 80 executes the computer program 82, it realizes the steps in the above embodiments of the tracking control method, for example figure 1 Steps S101 to S106 are shown. Alternatively, when the processor 80 executes the computer program 82, the functions of the modules in the above-mentioned device embodiments are realized, for example Figure 7 The functions of modules 71 to 76 are shown.
[0103] Exemplarily, the computer program 82 can be divided into one or more modules / units, and the one or more modules / units are stored in the memory 81 and executed by the processor 80 to complete this invention. The one or m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com