AGV anti-collision obstacle avoidance protection device and position self-adaptive adjustment method thereof
An adaptive adjustment and protection device technology, which is applied in the field of AGV anti-collision and obstacle avoidance safety protection, can solve the problems of prone to accidents and the inability of the contact type anti-collision and obstacle avoidance module to play its due role, so as to expand the protection range and solve the problem of Anti-collision and obstacle avoidance problems, the effect of prolonging the service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
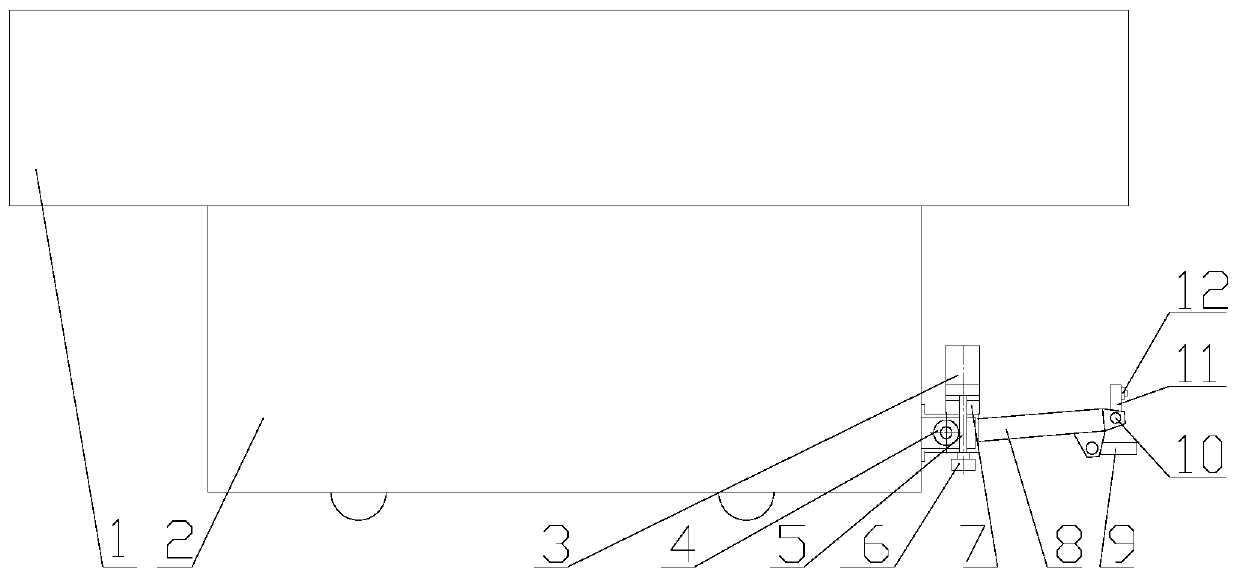
[0033] This embodiment takes the AGV equipment as an AGV car body as an example to describe the following.
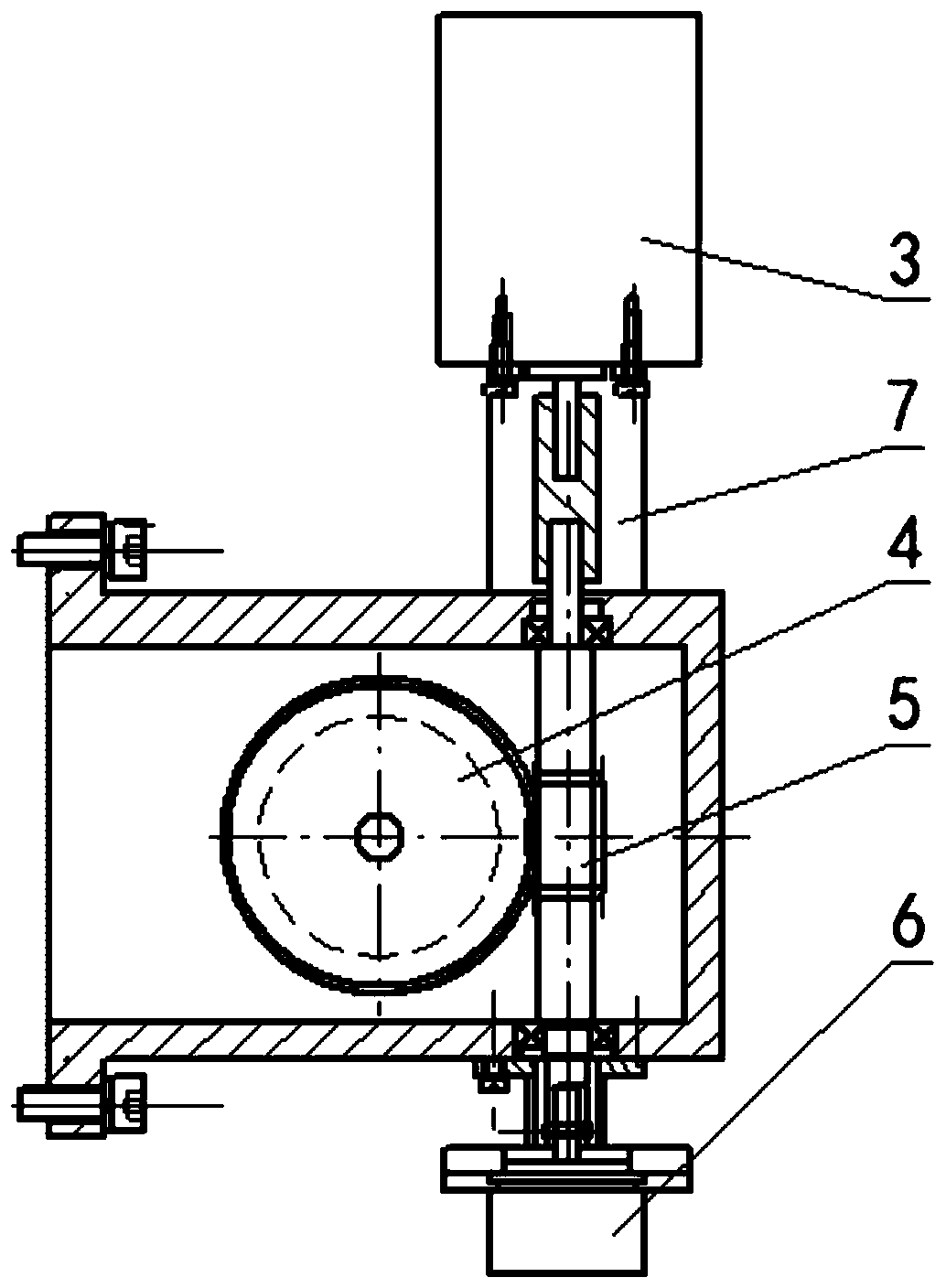
[0034] Such as figure 1 with figure 2As shown, the AGV anti-collision and obstacle avoidance protection device of the present invention is installed on the AGV car body 2, and includes an anti-collision and obstacle avoidance assembly for detecting obstacles and an adaptive adjustment assembly, which includes a self-locking function The transmission unit, the detection unit for detecting the end face of the super-long / long cargo 1, and the adjustment unit for adjusting the position and detection range of the collision avoidance and obstacle avoidance components, wherein the collision avoidance and obstacle avoidance components include non-contact obstacle avoidance sensors 10 and Contact obstacle avoidance sensor 8.
[0035] The non-contact obstacle avoidance sensor 10 is arranged on the detection unit, the contact obstacle avoidance sensor 8 is hinged with the adjus...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com