UWB-array-based automatic obstacle avoidance system and method for drone
A UAV and array technology, applied in the field of aviation science, can solve the problems that UAVs cannot avoid obstacles, UAVs are easily threatened by multi-directional obstacles, and cannot realize all-round obstacle avoidance, etc., so as to prevent body damage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
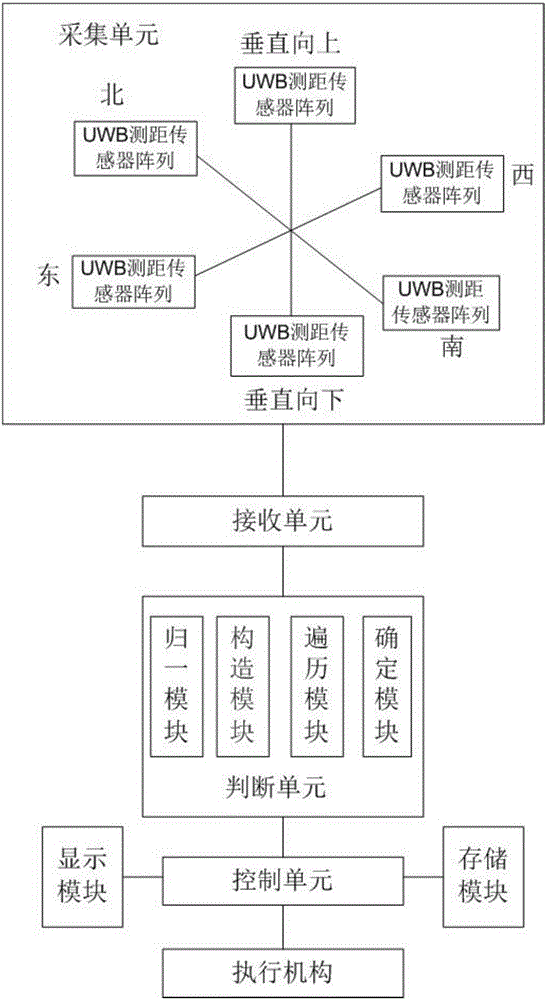
[0044] Such as figure 1 As shown, a UWB array-based UAV autonomous obstacle avoidance system of the present invention includes a body, and also includes an acquisition unit, a receiving unit, a judging unit, a control unit, and an actuator, and the acquisition unit includes a UWB ranging sensor array , the UWB range-finding sensor arrays are respectively arranged on the top, bottom, left, right, front, and rear sides of the body, and each direction is provided with four UWB range-finding sensor arrays, and the UWB range-finding sensor array includes Two UWB sensors, the UWB sensors are arranged in an array in the form of divergent measurement direction axes; the UWB ranging sensor array also includes ranging sensors of different ranges. Among them: acquisition unit: collect the distance data between the obstacles around the body and the body, and transmit the collected distance data to the receiving unit; receiving unit: receive the distance data transmitted by the acquisition...
Embodiment 2
[0047] On the basis of embodiment 1, a UWB array-based UAV autonomous obstacle avoidance method comprises the following steps:
[0048] A: Turn on the UWB ranging sensor arrays in the acquisition unit. The UWB ranging sensor arrays located on the top, bottom, left, right, front, and rear sides of the body all measure the distance data between the obstacle and the body. Collect and transmit the collected distance data to the receiving unit;
[0049] B: The receiving unit receives the distance data transmitted by the UWB ranging sensor array, and transmits the distance data to the judgment unit;
[0050] C: The judging unit calculates the distance data transmitted by the receiving unit into multiple distances, and simulates the size and shape of obstacles at different distances, and compares the minimum distance with the preset distance. When the distance is less than the preset distance , change its own heading to the preset heading, and adjust the flight altitude and flight a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com