A multi-robot task assignment method for intelligent storage system
A multi-robot, task allocation technology, applied in the fields of instruments, genetic laws, data processing applications, etc., can solve the problems of difficult selection of linear combination weights, low actual efficiency, and unbalanced task allocation of robots, so as to achieve the problem of system task allocation, improve The effect of science and rationality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
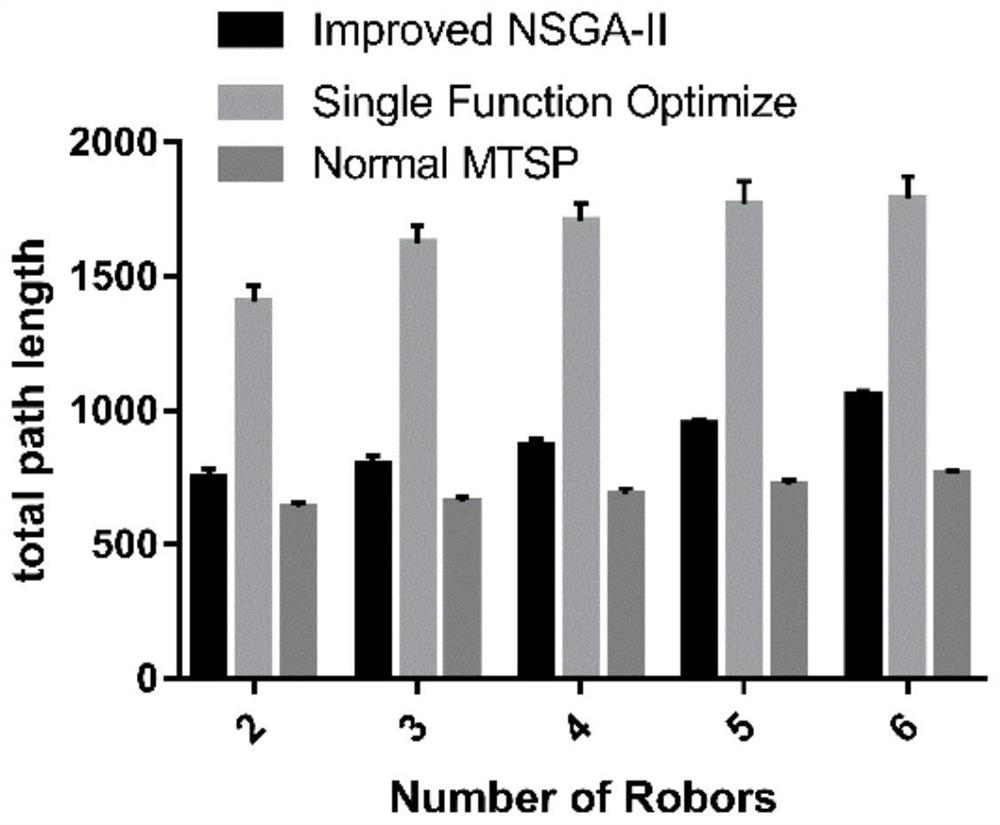
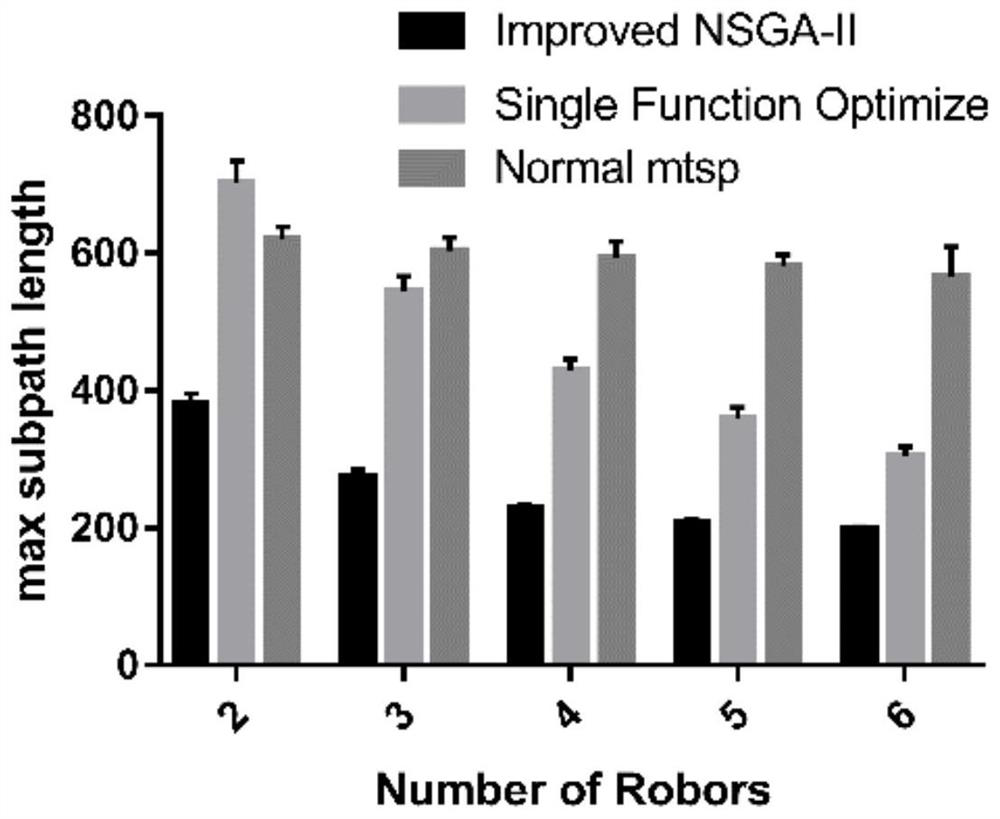
[0086] It can be seen from Table 3 that as the number of robots increases, the total path length of the robot group increases and the average path decreases, but the maximum travel time of the traditional multi-robot task allocation algorithm is much higher than that of the task allocation algorithm proposed by the present invention (improved -NSGA-II), and the total path of the SFO algorithm is much higher than the first two, and the time cost and energy consumption cost are far inferior to the improved genetic algorithm proposed by the present invention.
[0087] The statistical results of the algorithm in the test data set are as follows:
[0088] Table 3 Performance of improved-NSGA-II algorithm in each data set
[0089]
[0090] figure 2 and image 3 Respectively represent the algorithm of the present invention and the SFO algorithm, the comparison diagram of the energy consumption cost and the time cost of the conventional multi-robot task allocation algorithm, it ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com