2D laser data-based real-time positioning method of robot
A real-time positioning and robot technology, applied in the field of inspection robots, can solve the problems of low positioning accuracy and low real-time performance of positioning algorithms, and achieve the effects of improving positioning accuracy, increasing effective usage, and optimizing memory usage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. It should be understood that the preferred embodiments are only for illustrating the present invention, but not for limiting the protection scope of the present invention.
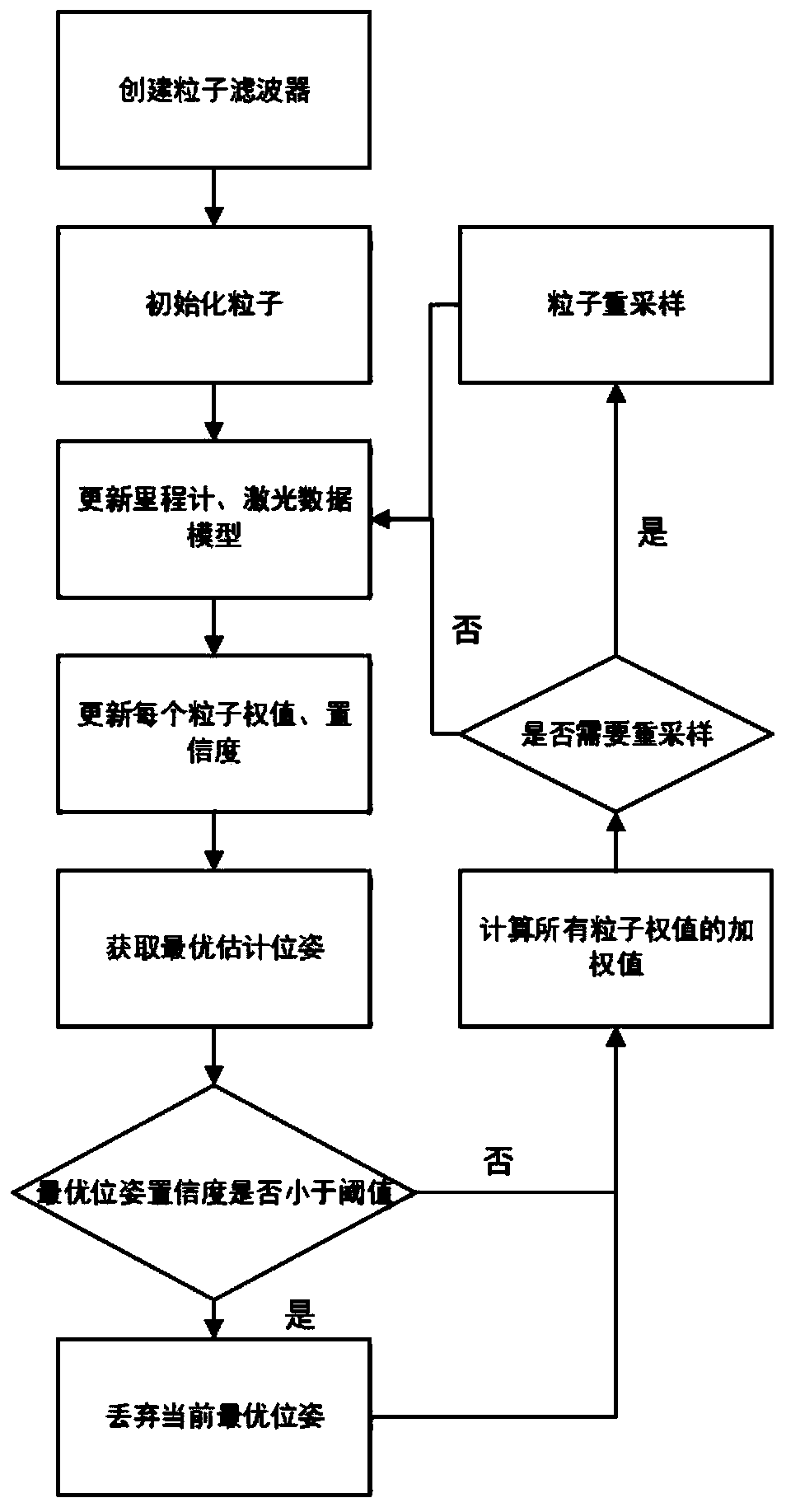
[0035] Such as figure 1 Shown, a kind of robot real-time positioning method based on 2D laser data of the present invention comprises the following steps:
[0036] Step 1: Create a particle filter and generate a sampling particle set Let k=0, where x represents a single particle, k is a certain moment, i is the index number of the particle, and N is the total number of particles;
[0037] Step 2: Initialize the particles and limit the particles to the walkable area of the robot;
[0038] Step 3: If the current update value of the robot is greater than the threshold, update the odometer model and the laser data model, and process the laser data model in separate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com