Automatic landing and recovery system for unmanned aerial vehicle under complex dynamic bump conditions
An automatic landing and recovery system technology, applied in the field of unmanned aerial vehicles, to achieve the effect of expanding the application range, mature technology, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below with reference to the accompanying drawings and examples.
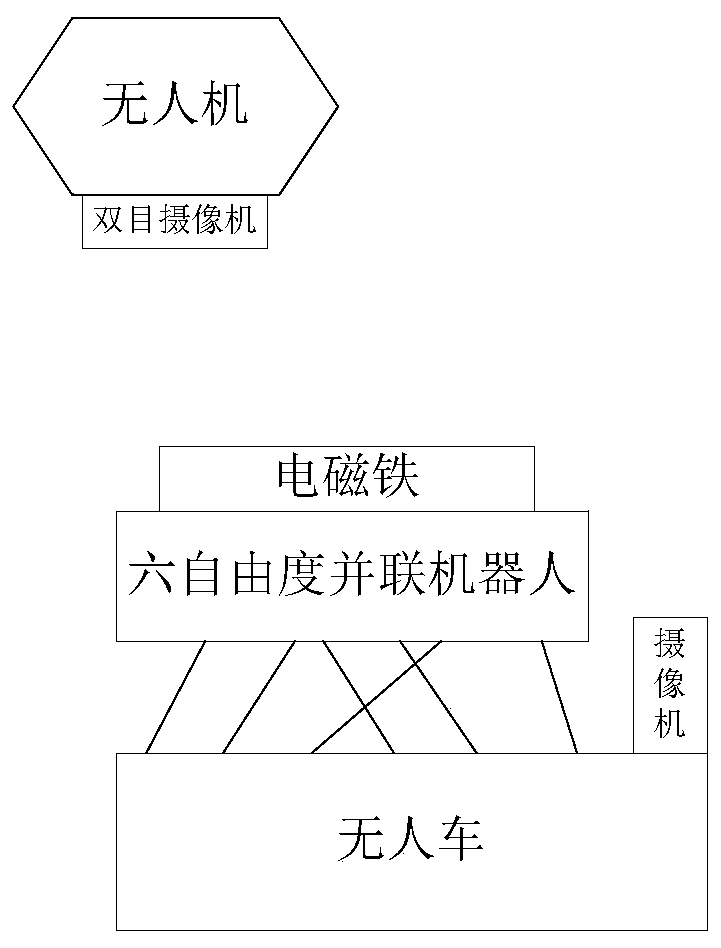
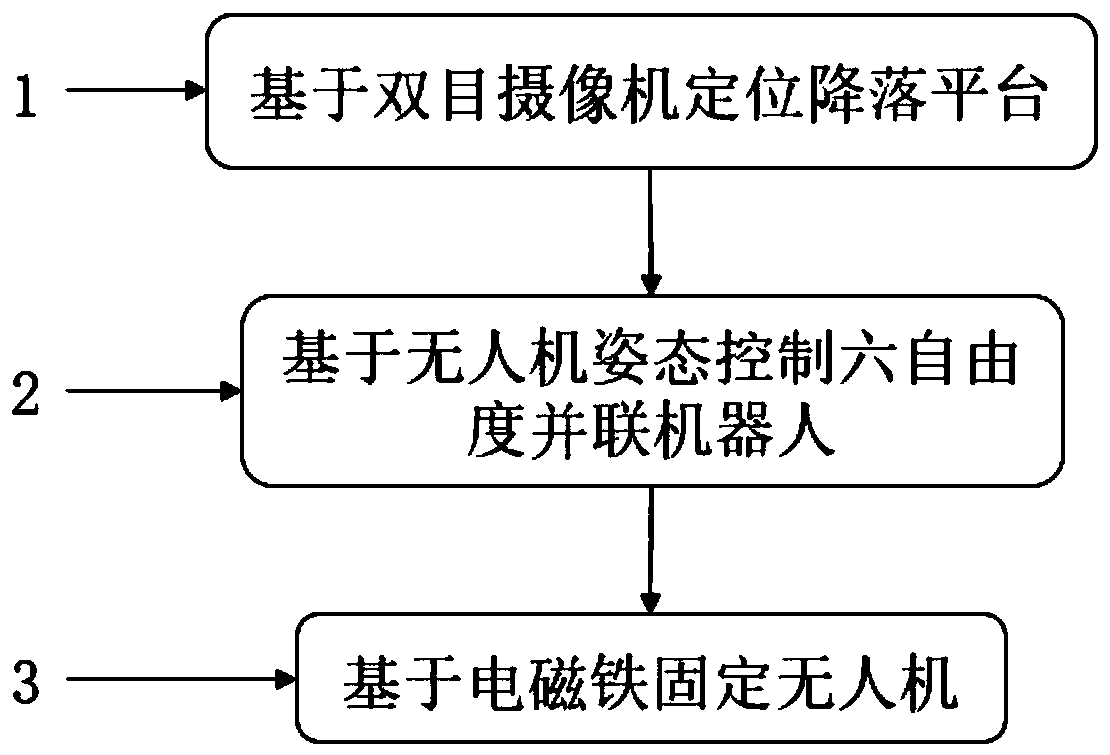
[0027] The invention provides an automatic landing and recovery system for unmanned autonomous aircraft under complex dynamic turbulence conditions, which solves three key problems: one is that the unmanned aerial vehicle must autonomously identify the landing platform and move to the platform autonomously; The environment in which the platform moves is relatively bumpy, and the platform needs to be able to maintain a static attitude to a certain extent, without shaking with vehicles, ships, etc., or to make autonomous adjustments according to the attitude of the drone to fit the attitude angle of the drone when it lands. , to reduce the impact on the landing platform in a dynamic environment; the third is to fix the UAV after it has docked, so as not to fall with the movement of vehicles and other carriers.
[0028] For the above key issues, see figure 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com