An obstacle-surmounting system and robot of an autonomous obstacle-surmounting glass-wiping robot
A glass-cleaning robot and obstacle-surpassing technology, which can be used in robot cleaning machines, automatic detection of obstacles, window cleaning, etc., and can solve problems such as inability to automatically cross over and low work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
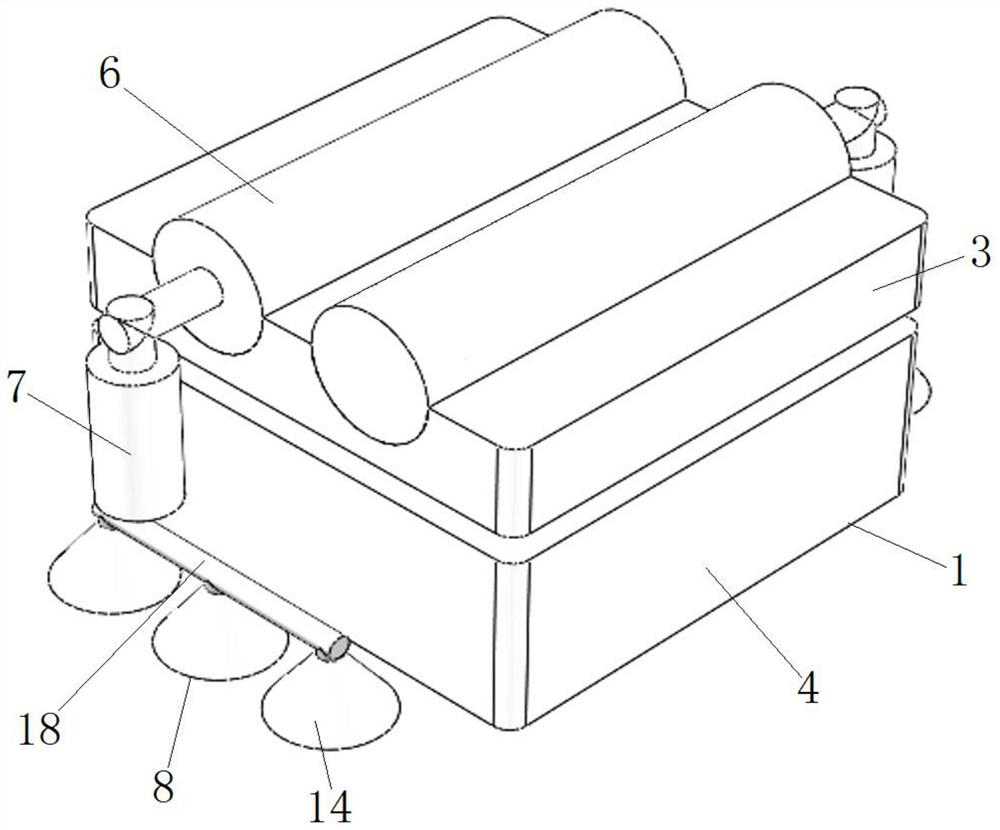
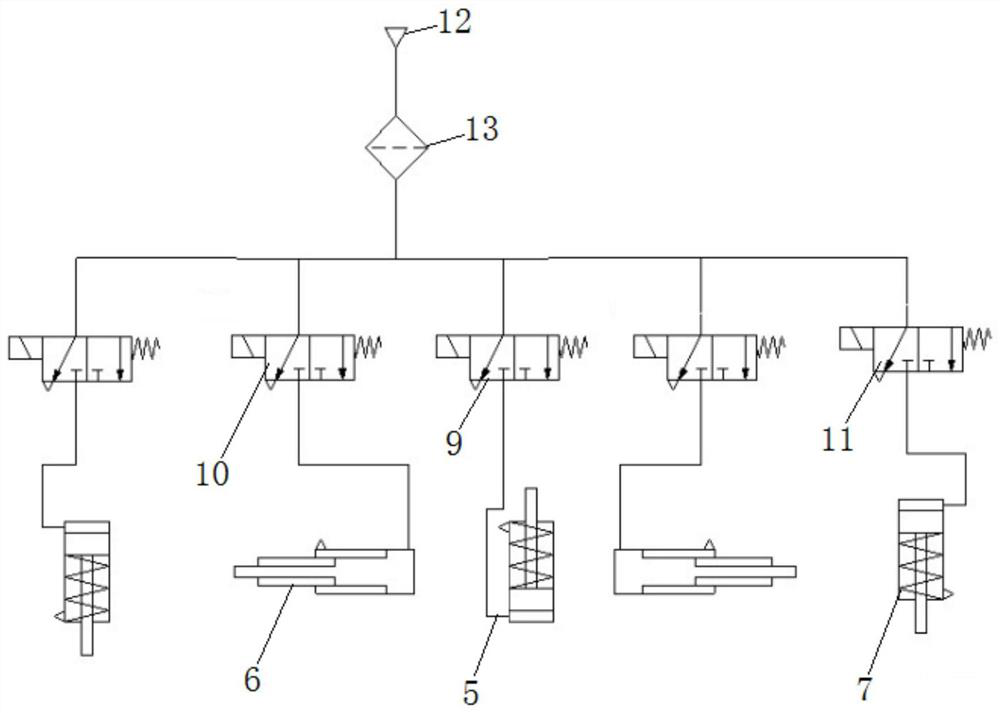
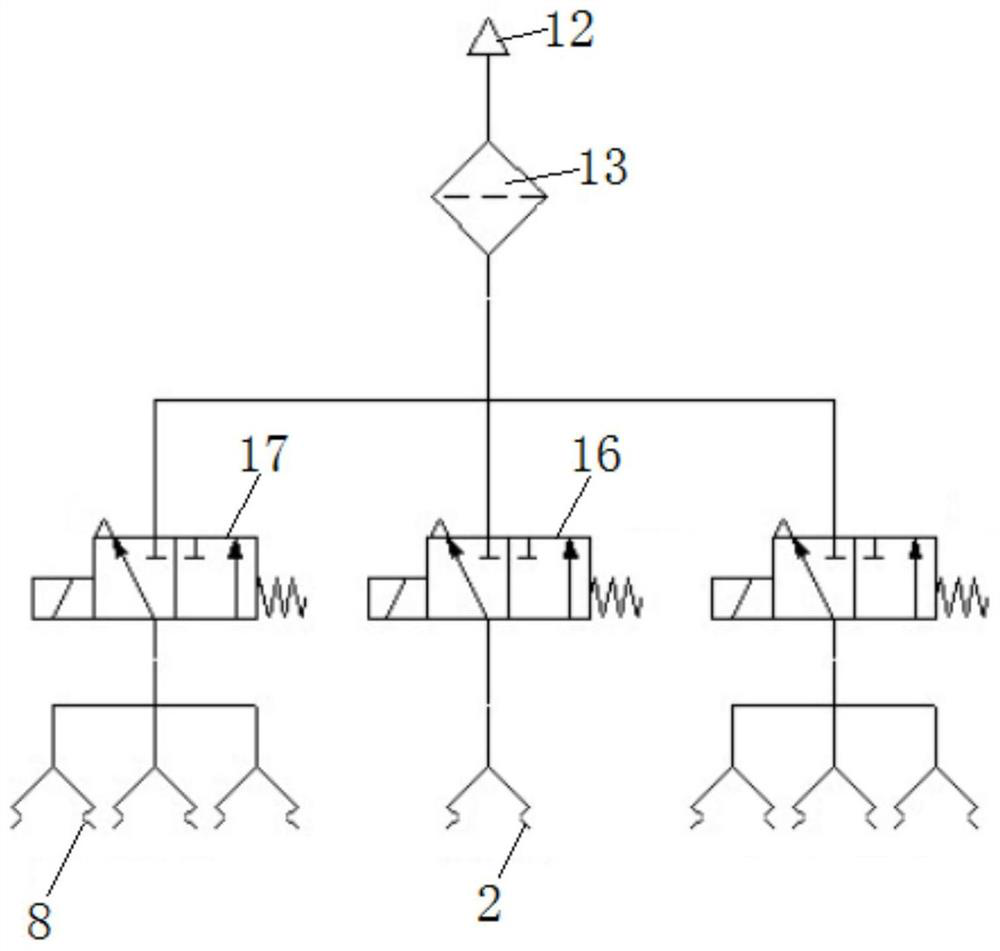
[0047] see figure 1 , figure 2 as well as image 3 , the present embodiment provides an autonomous obstacle-surmounting type glass-wiping robot obstacle-overriding system, the obstacle-overriding system includes a main machine 1, a main sucker 2, a lifting mechanism, an obstacle-overriding mechanism and a supporting mechanism, and may also include a main electromagnetic valve 16 , vacuum source 12 and filter 13. In this embodiment, the obstacle surmounting system climbs over obstacles from glass one to glass two.
[0048]The host 1 includes a first body 3 and a second body 4, and may also include a controller. The fuselage one 3 and the fuselage two 4 are flexibly connected. In this embodiment, the host 1 is in the shape of a cuboid, but in other embodiments, the host 1 can also be in other shapes, such as a disk. Body 1 3 and body 2 4 can be connected by sliding rods, etc., and the axial direction of the sliding rod is perpendicular to the surface of glass 1, so that bo...
Embodiment 2
[0064] This embodiment provides an autonomous obstacle-surmounting glass-wiping robot, which includes the obstacle-overriding system of the autonomous obstacle-surmounting glass-wiping robot in Embodiment 1. The robot of this embodiment can move and turn in a straight line on the glass surface through the cooperation between the vacuum adsorption of the main suction cup and the additional crawler carrier structure. After the robot is powered on, it will move and wipe along the specified path. The robot uses a microfiber cleaning rag to wipe wet and dry to achieve the purpose of cleaning. When a piece of glass is cleaned and the next piece of glass is about to be wiped, because it needs to cross the window frame, the obstacle clearance system starts and the robot The whole goes from one piece of glass over the window frame to another piece of glass that needs to be wiped, and wipes and climbs over obstacles in turn, so that multiple pieces of glass can be wiped, and this proces...
Embodiment 3
[0066] This embodiment provides an autonomous obstacle-surmounting obstacle-surmounting system for a glass-wiping robot, which is similar to the obstacle-surmounting system in Embodiment 1, except that the first telescopic element 5, the second telescopic element 6, and the third telescopic element 7 of this embodiment All are electric push rods, and the corresponding solenoid valve one 9, solenoid valve two 10 and solenoid valve three 11 are removed. The controller of the main engine 1 directly controls the on-off of the power supply of the first telescopic part 5, the second telescopic part 6 and the third 7 of the telescopic part, so as to realize the first action, the second action and the third action. Compared with Embodiment 1, this embodiment has removed part of the structure, so the structure is simpler.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com