Wheel with variable center position applied to robot and method for adjusting center position
A center position, robotic technology, applied in the field of robotics, can solve problems such as inability to fully promote, poor absorption capacity, and inability to climb, and achieve the effect of improving walking adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0057] Embodiment 1: each linear expansion device is preferably a servo electric cylinder.
Embodiment approach 2
[0058] Embodiment 2: each linear expansion device is preferably a cylinder.
Embodiment approach 3
[0059] Embodiment 3: each linear expansion device is preferably an elastic damping element.
[0060] As an alternative, the several linear expansion devices in the centering mechanism can also be a combination of servo electric cylinders and air cylinders.
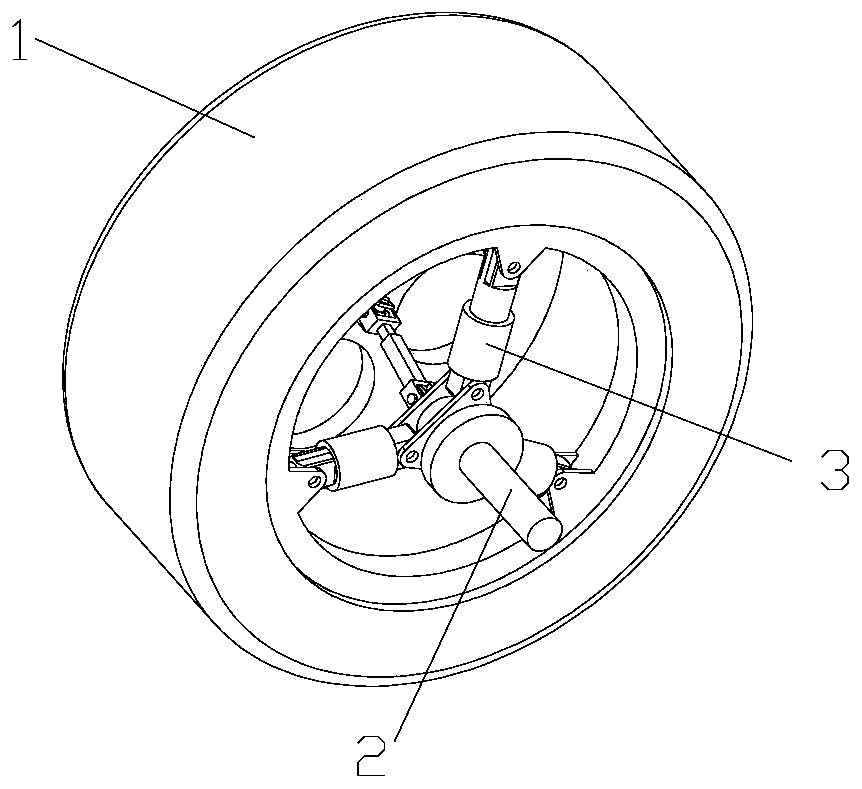
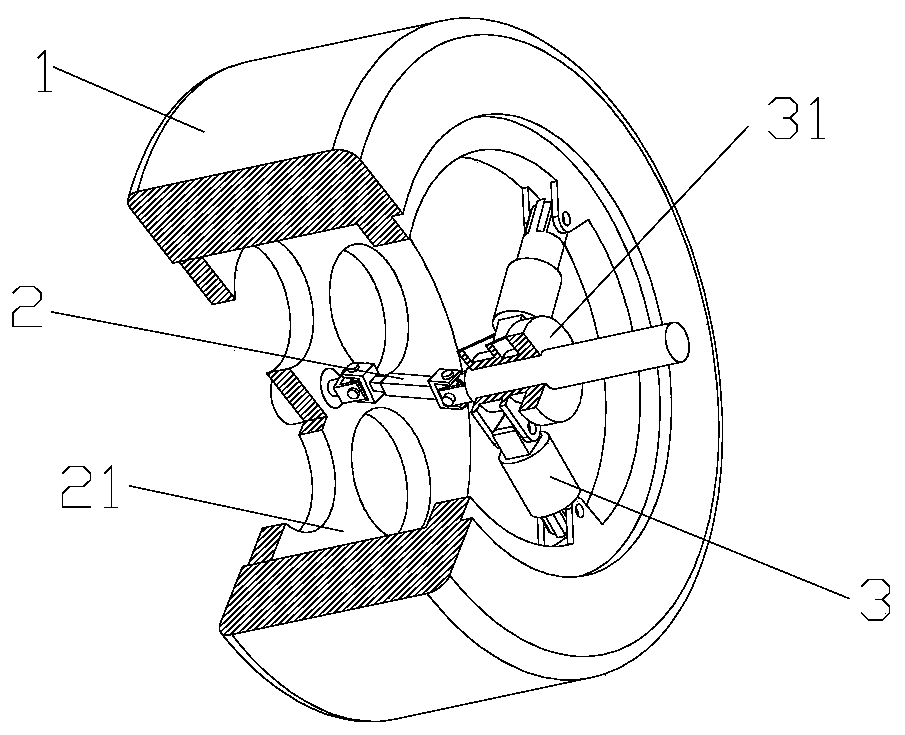
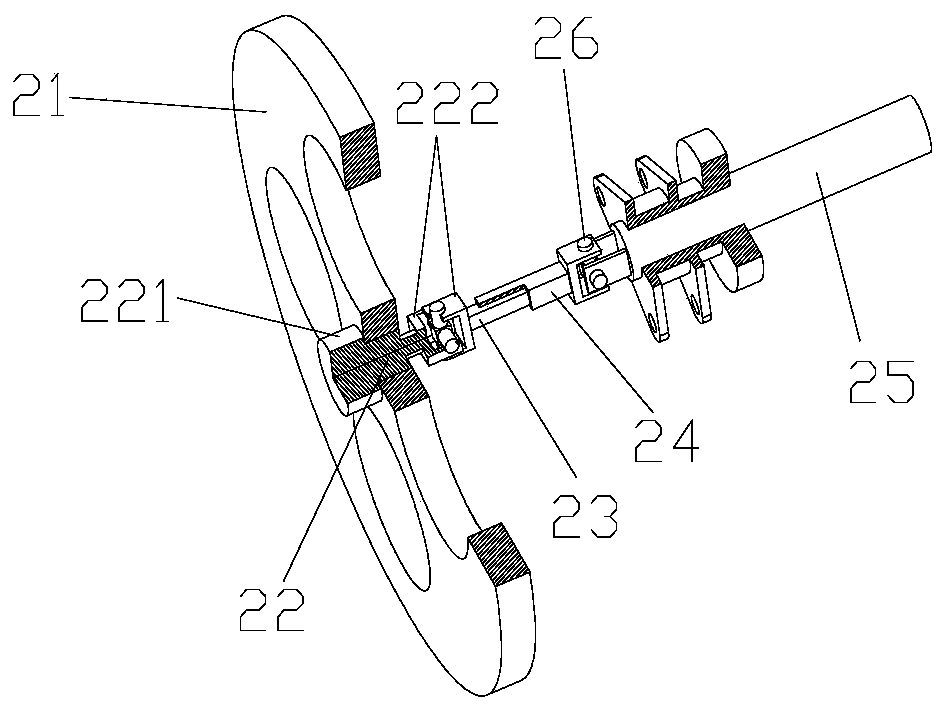
[0061] Such as Figure 6 As shown, the working principle is: by controlling the length expansion and contraction of each linear expansion device, the adjustment of the center position is realized, and the center distance is ex, ey, so that the center position can be dynamically controlled.
[0062] A method for adjusting the center position of a wheel with a variable center position. The center position of the wheel is adjusted according to the road environment conditions on which the robot is driving. The specific adjustment method is as follows.
[0063] 1) if Figure 7 As shown, when the robot is driving on a level ground, by controlling the length expansion and contraction of each linear expansion device, the line conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com