Unmanned ship track planning method based on deep optimization
A track planning and unmanned ship technology, applied in the field of unmanned ship navigation control, can solve the problems of reduced execution efficiency, reduced execution speed, and unevenness, so as to speed up the speed of pathfinding, improve execution efficiency, and safety high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
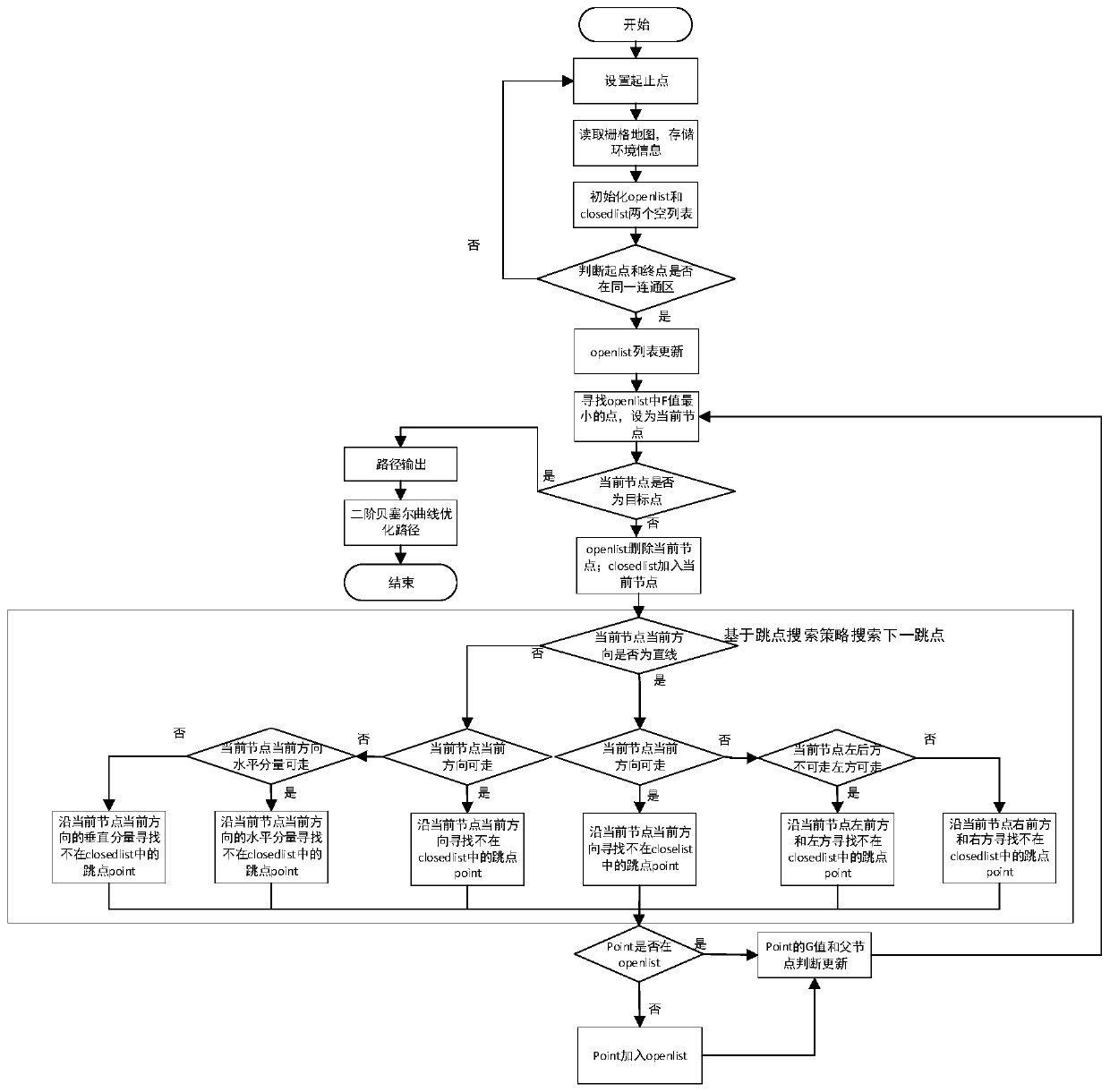
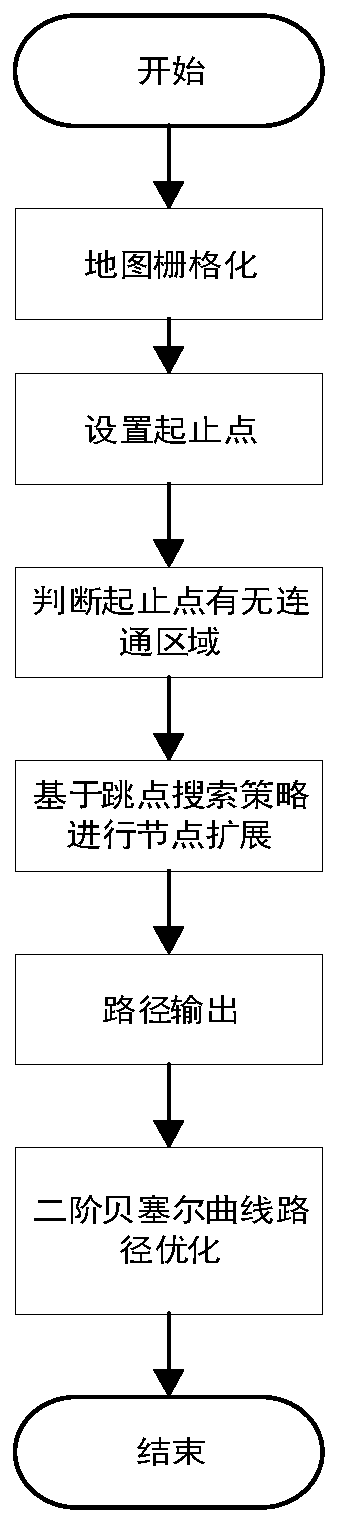
[0054] For better elaboration, the present invention introduces the application of the present invention by taking the A-star algorithm as an example, and provides a method for unmanned ship track planning based on depth optimization, such as figure 1 As shown, it specifically includes the following steps:
[0055] A1. Obtain the starting point and end point of the rasterized map based on the A star algorithm, and initialize the openlist list and the closedlist list. details as follows:
[0056] A11. Read the rasterized map information, set the start point and end point;
[0057] A12. Add the start point obtained in step A11 and reachable neighbor nodes along the eight directions of the start point to the openlist list, and add the start point and end point obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com