Robot map construction method in complex environment based on fog computing
A complex environment and map construction technology, applied in the fields of genetic laws, genetic models, geographic information databases, etc., can solve the problems of high algorithm complexity and high energy consumption, so as to solve the problems of high complexity, reduce complexity, and avoid airborne The effect of excessive unit load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
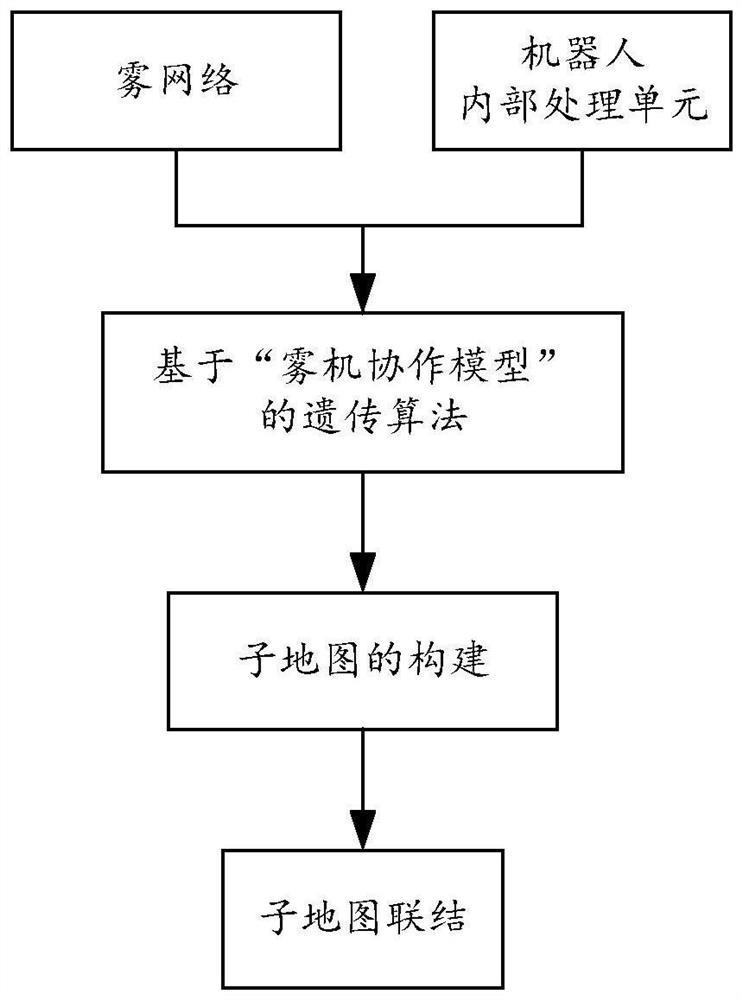
[0017] Such as figure 1 As shown, the robot map construction method in a complex environment based on fog computing, including simultaneous positioning and map construction, assigns tasks through genetic algorithms, and the robot and fog nodes cooperate to establish local sub-maps, and finally complete the map construction method. Include the following steps:
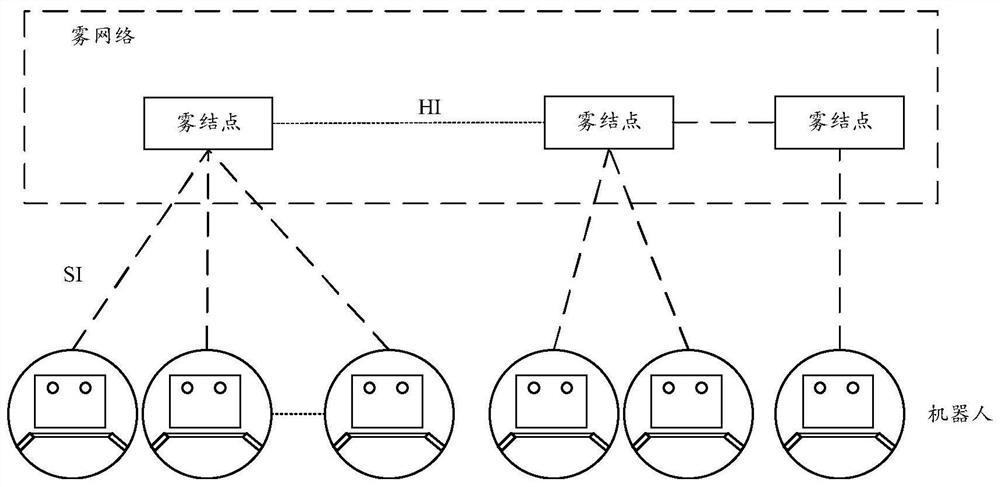
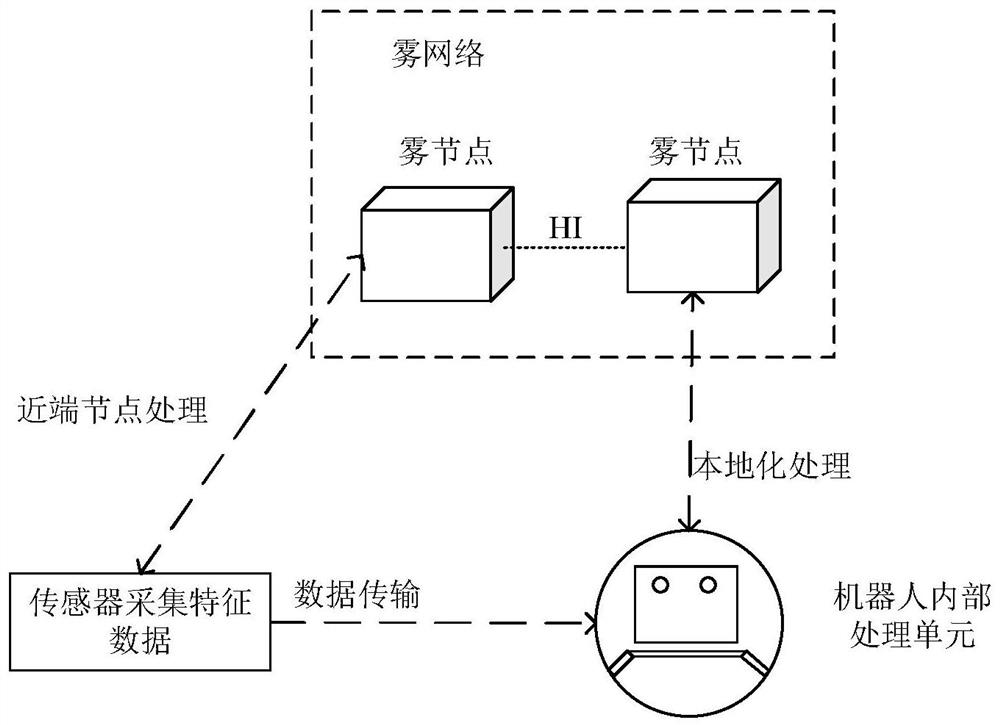
[0018] (1) Establish a fog computing framework, which includes multiple fog nodes and multiple robots, and the fog nodes communicate with each other through horizontal interfaces to form a fog network. Fog nodes can cooperate to complete multi-point coordination (Coordinated Multiple Points, CoMP), distributed storage system or distributed computing system to obtain better communication, storage and data processing capabilities. HI transmits control and digital information that support...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com