Mobile inspection and seedling supplementing robot for greenhouse seedbeds
A robot and seedbed technology, applied in the field of robots, can solve the problems of hindered large-scale vegetable production, reduced vegetable production efficiency, and increased vegetable labor costs, so as to improve the work efficiency of seedling replenishment, increase the survival rate of seedlings, and reduce damage to seedlings Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0025] Further description will be given below in conjunction with the embodiments shown in the accompanying drawings.
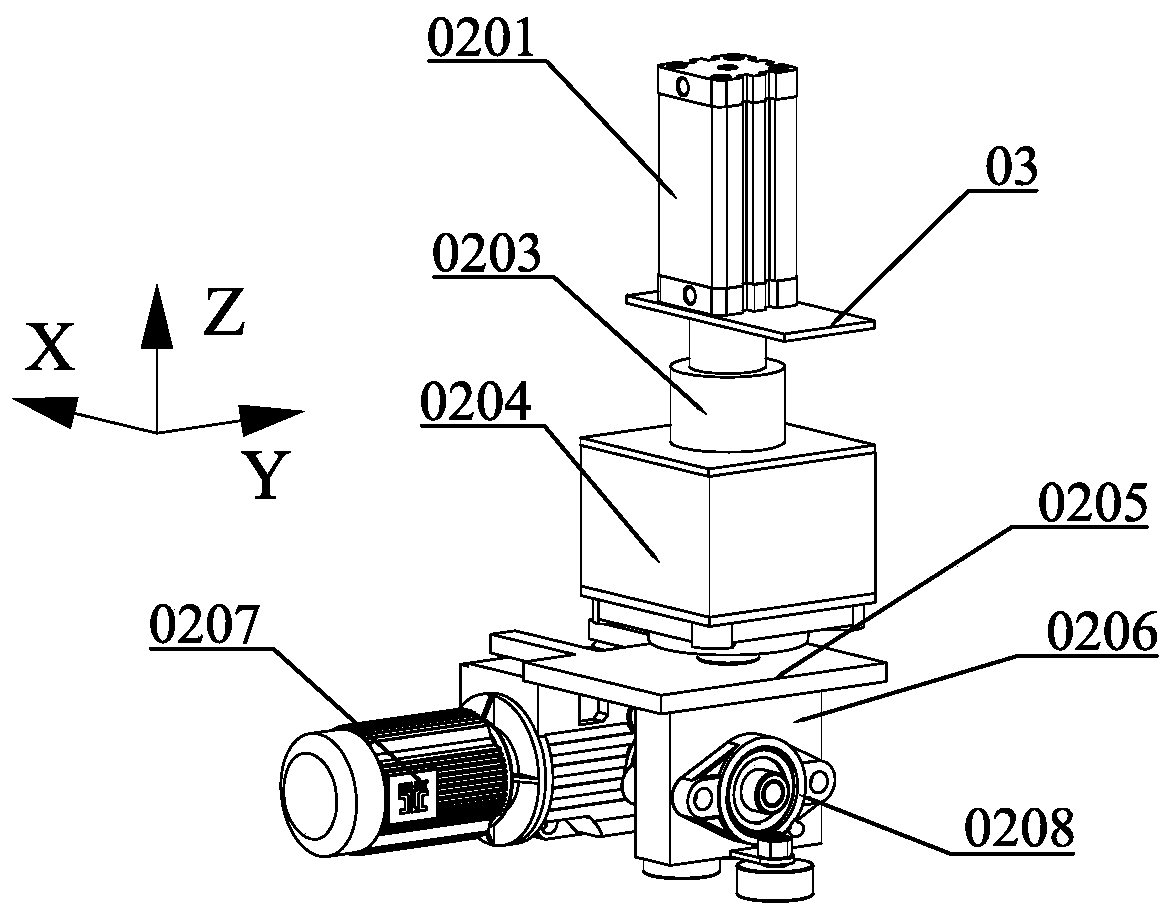
[0026] For convenience of description, present embodiment adopts X, Y, Z coordinate system, and X-axis and Y-axis constitute horizontal plane (wherein the direction of Y-axis is the length direction of seedbed, i.e. figure 1 The left and right directions in the middle), the positive direction of the Z axis is perpendicular to the X-Y plane and goes up vertically.
[0027] Conventional vegetable seedling replenishment technology is to replace the seedling tray 05 on the seedling replenishment platform 04 ( Figure 9 Shown) the excellent seedlings are selected, and transplanted to replace the inferior seedlings to be replaced on the seedling tray 11 on the seedbed 09, thereby ensuring that all the seedlings on the seedbed are high-quality seedlings; due to the high labor intensity and low production efficiency of manual frequent operations, The invention deve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com