System and method for efficiently controlling robot
A robotic and efficient technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of low operation efficiency, low cost performance, the calibration method cannot be used in unknown camera motion and uncontrollable occasions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0473] Example 1: Vision System Design
[0474] 1. Visual system design goals
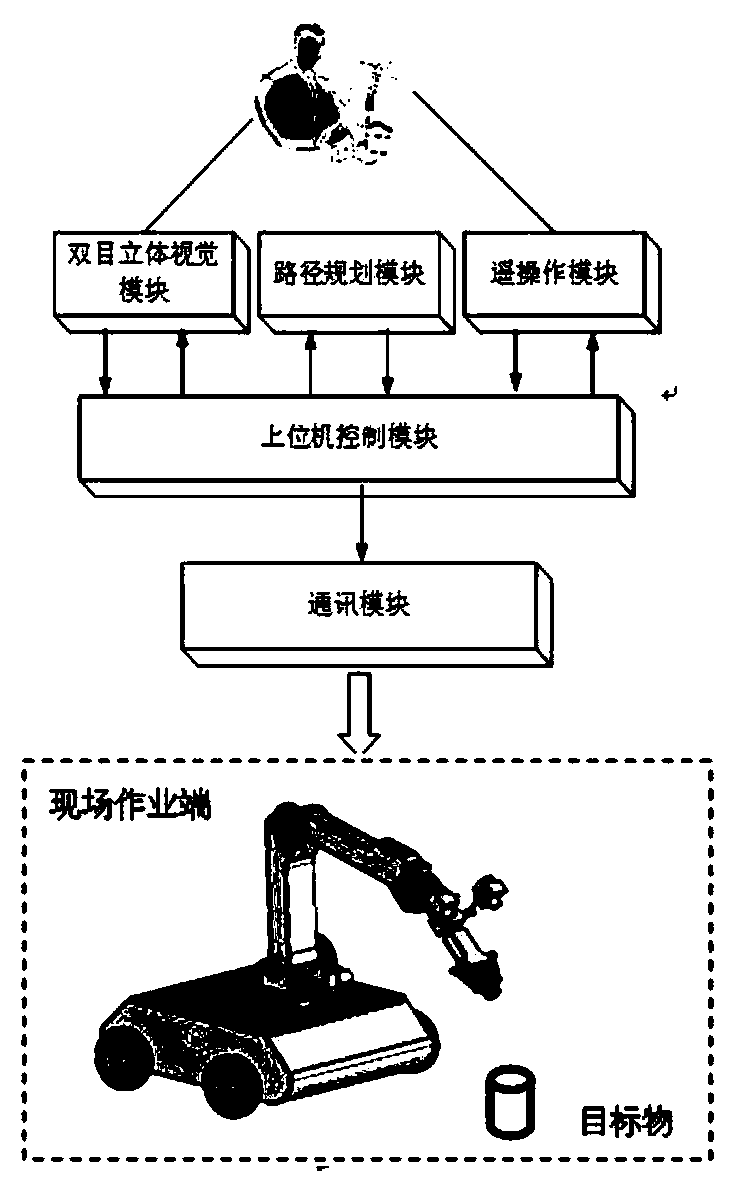
[0475] The robot vision system is the core part that embodies the intelligence of the robot. The vision system of the EOD robot of the present invention mainly realizes the following parts:
[0476] (1) Image acquisition through the image acquisition card
[0477] (2) Calibrate the camera
[0478] (3) Match the images to find the position of the target point on the left and right images
[0479] (4) Perform three-dimensional distance calculation on the left and right images, and obtain the three-dimensional coordinates of the target point
[0480] (5) Send data through the serial port
[0481] 2. The hardware platform and software platform of the vision system
[0482] (1) Hardware platform
[0483] In the binocular stereo vision subsystem of the robot of the present invention, there are two cameras in total, and the two cameras are installed on the forearm of the mechanical arm as the "two e...
Embodiment 2
[0533] Example 2: Robot Operation Instructions
[0534] 1. The software interface of the robot mainly includes the following parts, the operation main interface: (operation main interface diagram)
[0535] a. Image display area: It mainly displays the images of the two eyes of the robot, and realizes the processing of the two images. The processing mainly includes the following parts, which are:
[0536] 1) Import the images captured by the two cameras
[0537] 2) Search and select the target of interest
[0538] 3) Match the left and right images
[0539] 4) Obtain the three-dimensional coordinates of the target object according to the matching result.
[0540] b. Functional area:
[0541] The operation of the whole robot is mainly divided into the following parts:
[0542] 1) Binocular vision operation part
[0543] 2) Manual control part
[0544] 3) The remote operation part of the handle
[0545] 4) Other auxiliary parts
[0546] Note: The entire control system se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com