Point, line and plane obstacle model construction-based station real-time emergency response path planning method
A path planning and obstacle technology, which is applied in the field of station real-time emergency path planning based on the point-line-plane obstacle model, can solve the problems of heavy data modification workload, high computational complexity, and inability to build maps, etc., to increase practicality Sexuality and innovation, ensuring safety, and improving office efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0085] The real-time emergency route planning method for stations constructed based on the point, line and surface obstacle model in this embodiment includes the following steps:
[0086] Step 1: Establish an environmental map of station security personnel:
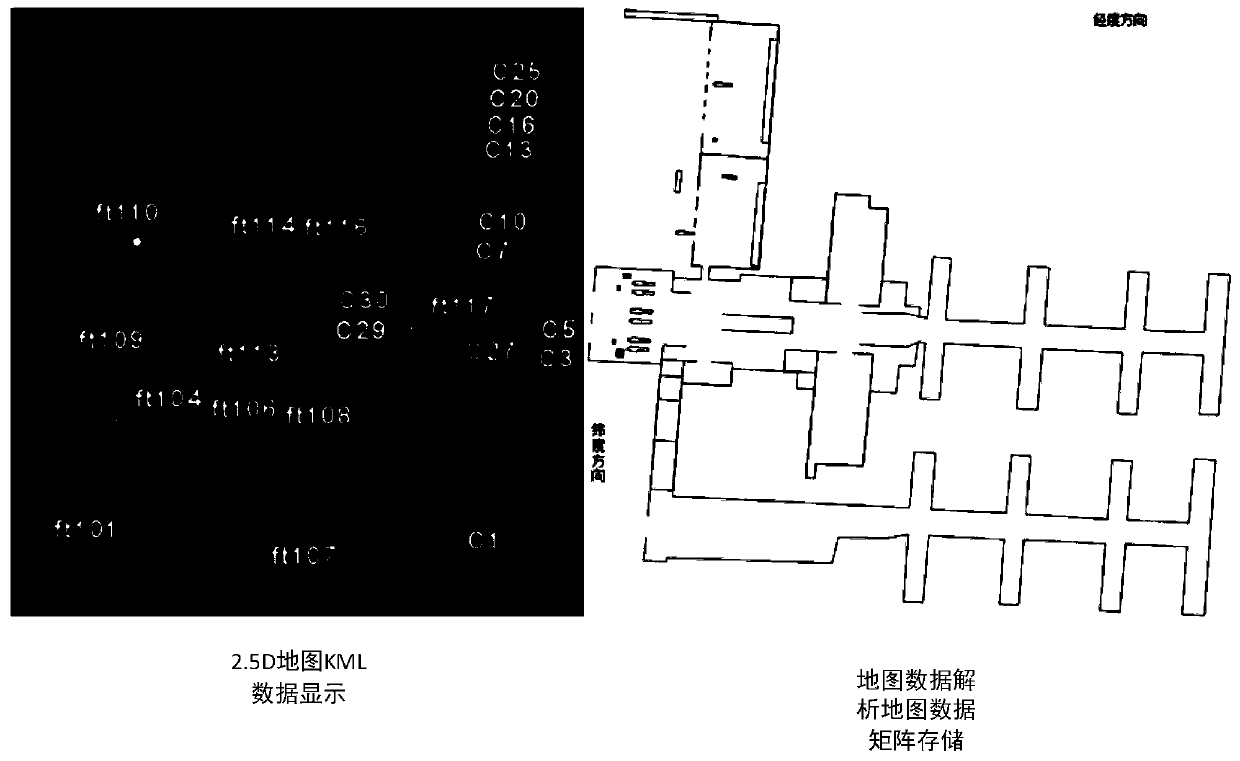
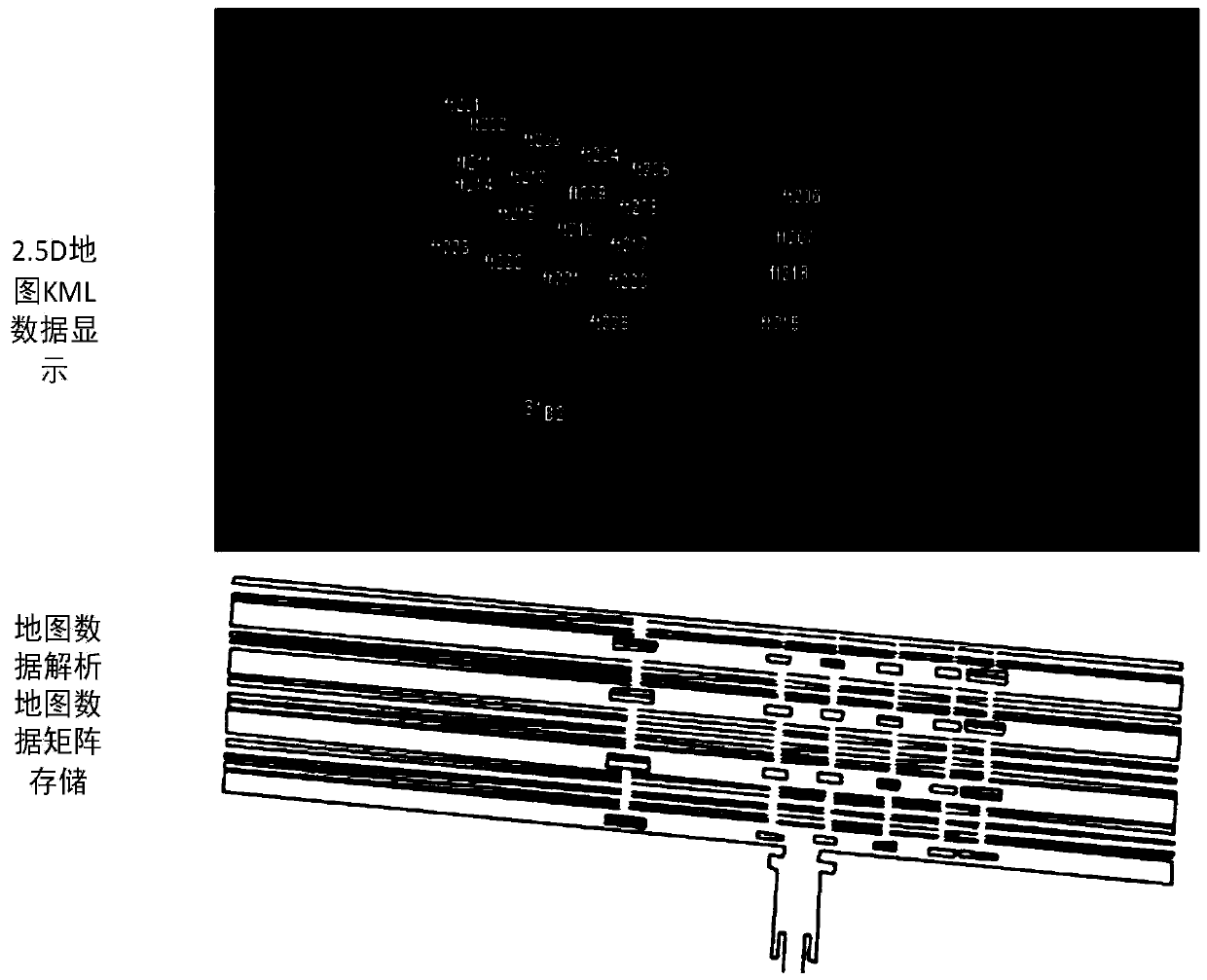
[0087] 1-1. Data collection: Take a three-story railway station in China as an example. The first floor is mainly the ticket hall, the second floor platform, and the third floor waiting room. figure 1 , The point cloud data of the station to be planned collected by the laser scanner is converted to 3ds format and imported into 3dmax; the localspace software is used to draw a rough outline, and the buildings and equipment related to path planning are marked in advance whether they are passing or up and down Line attributes, floor information, the buildings and equipment refer to elevators, artificial escalators, exit passages, security personnel’s special escalators, etc., to assist in completing the storage of map information, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com