Time optimal rapid three-dimensional obstacle avoidance path planning method
A time-optimized and path-planning technology, applied in three-dimensional position/channel control, etc., can solve problems such as unguaranteed convergence and solution efficiency, and achieve the effect of improving task response ability and realizing online planning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
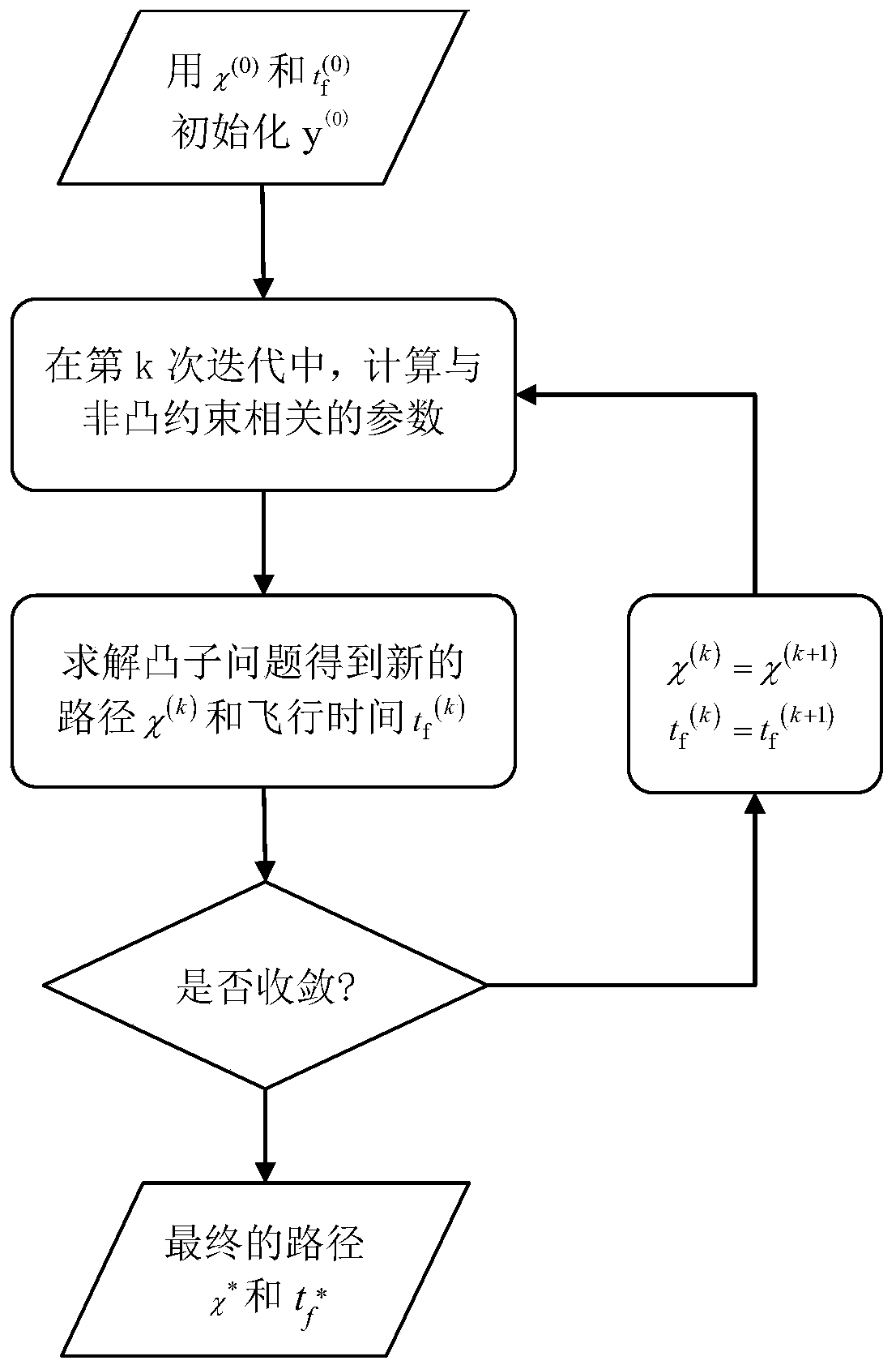
[0154] A method for time-optimal path planning considering obstacle constraints disclosed in this embodiment, the specific steps are as follows:
[0155] Step 1: UAV kinematics modeling. based on figure 1 As shown, the dimensionless motion equation of UAV three-dimensional obstacle avoidance is expressed as:
[0156]
[0157] where [x, y, z] T is the spatial position of the UAV, z is the height, x, y are the coordinates in the orthogonal direction of the horizontal plane; Vc is the speed of the UAV, which is assumed to be a known quantity; ψ and ϕ are the flight path angle and heading angle, respectively. In equation (1), in addition to ψ and φ, the distance variable [x, y, z] T Using the Euclidean distance L of the initial and end positions 0 to normalize, the velocity is V c Normalized. Both time and specific impulse use L 0 / V c Normalized.
[0158] Step 2: Establish an optimal control problem model for obstacle avoidance path planning:
[0159] The control qua...
Embodiment A
[0275] Embodiment A Barrier-free path planning
[0276] For the special two-dimensional case, that is, the Dubins problem with z=0, the initial and end conditions are detailed in Table 1. For convenience, the maximum turning radius is set to 120m (the maximum curvature is 1 / 120), a max =V c *1 / 120=0.83m / s 2 . Convergent solutions are obtained in 3 iterations, and each iteration only takes 0.01-0.02 seconds to solve SOCP problem P3. Since the values z and ψ are always zero (consistent with the numerical solution), they do not show up in the plot for 2D problems.
[0277] Table 1 Initial and terminal conditions of two-dimensional path planning without obstacle avoidance constraints
[0278]
[0279] The calculation convergence process under the Dubins task is as follows Figure 6 and Figure 7 . It can be seen that after the second iteration, the continuous solution of the path and flight time has little difference in the scale of the figure, and the error between e...
Embodiment B
[0283] Embodiment B Three-dimensional path planning considering obstacles
[0284] In this case, set up a path planning task with two obstacle avoidance constraints. As a comparison, this case also gives the solution without obstacle avoidance constraints under the same endpoint conditions and overload constraints. The maximum acceleration is set to 0.8m / s 2 , the initial and termination conditions are shown in Table 3. The radius of the obstacle ball is 80m, centered at [250, 220, 280]m, the radius of the obstacle cylinder is 60m, and its center line passes through the x-y plane at [100, 150, 0]m with and without avoidance. obstacle limit, the minimum flight time is 71.41 seconds and 70.34 seconds respectively. Figure 11-17 The converged solution plotted in shows that the initial, terminal, and acceleration constraints are all satisfied. Figure 11 The optimal paths with and without obstacle avoidance constraints are plotted in . exist Figure 12 In , the top represent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com