Cooperative driving mechanism for active and passive decoupling between fingers
A driving mechanism and first-finger technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as insufficient dexterity and poor object manipulation ability, and achieve reduced volume and weight, good adaptability, and simplified structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
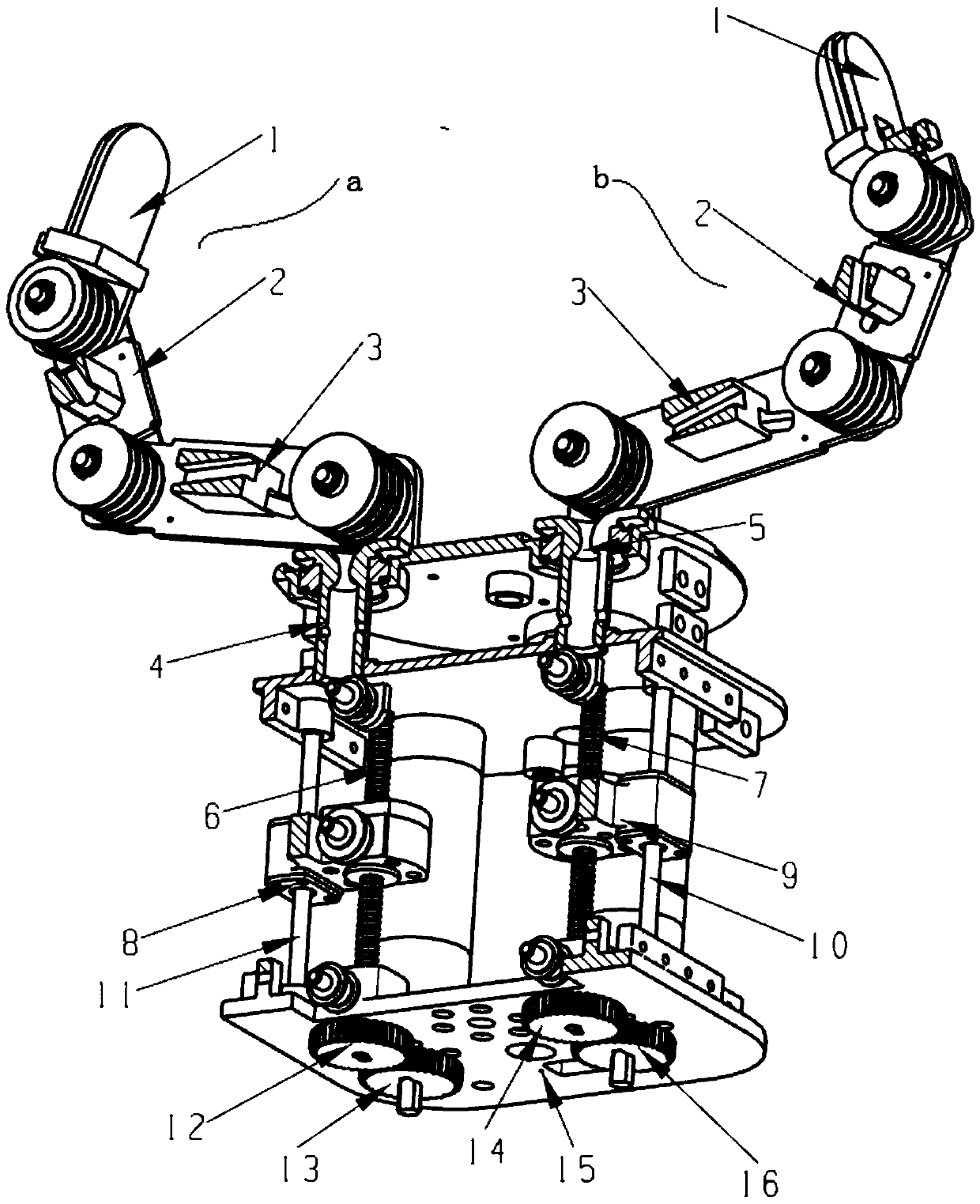
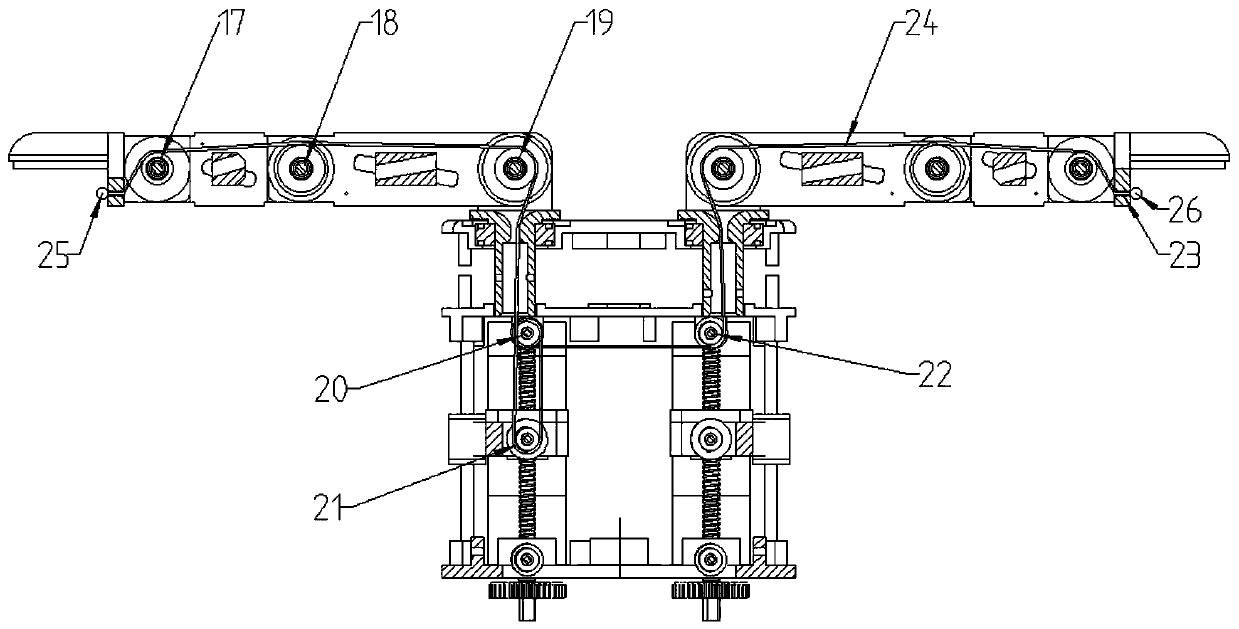
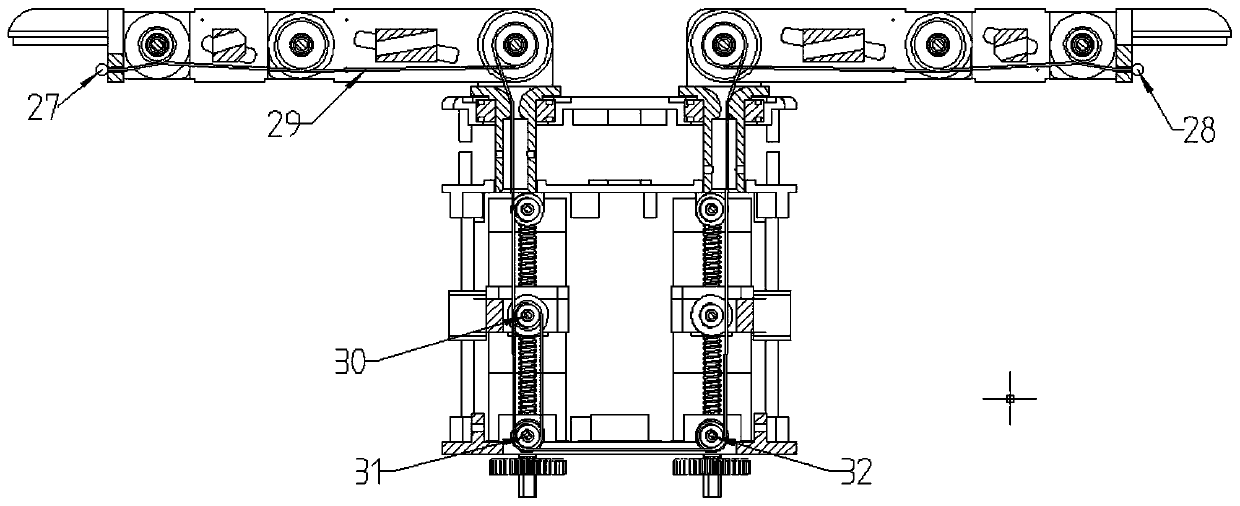
[0024] The finger part consists of two fingers with the same shape and structure. Each finger has three finger segments, which are far segment 1, middle finger segment 2, and near finger segment 3 from the farthest to the base. Each finger has three joints, which are named as far joint, middle joint and proximal joint from far to near to the base. Pulleys are arranged at the finger joints, wherein the first pulley 19 and the tenth pulley 36 are located at the proximal joints of the fingers, the second pulley 18 is located at the middle joints of the fingers, and the third pulley is located at the distal joints of the fingers. Between the middle ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com