
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An unmanned cleaning vehicle and its driving method
A technology of sweeping vehicles and vehicles, which is applied in the field of sanitation vehicles and can solve problems such as low accuracy and complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
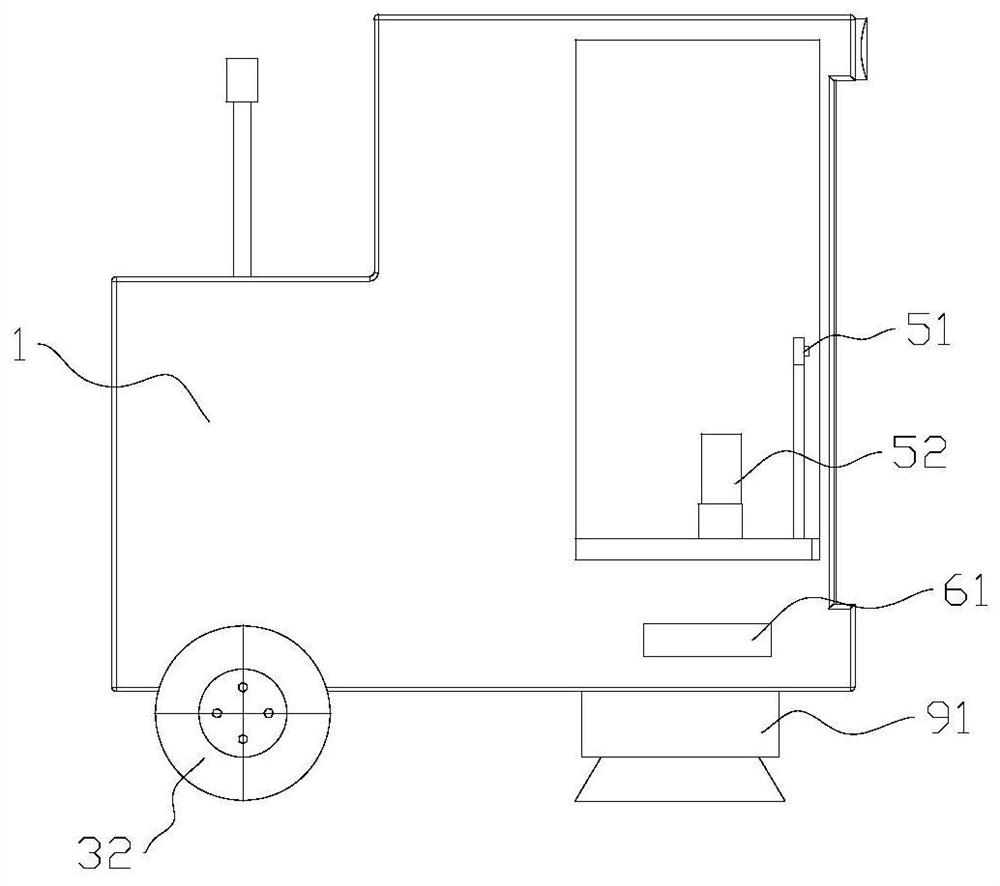
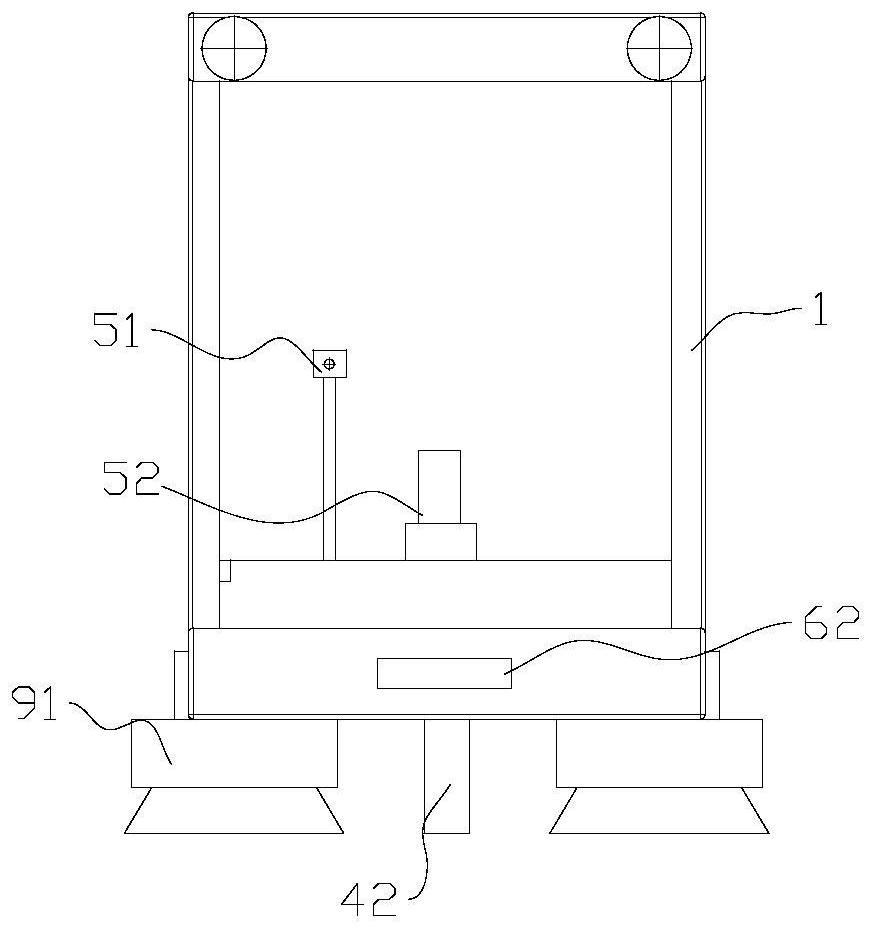
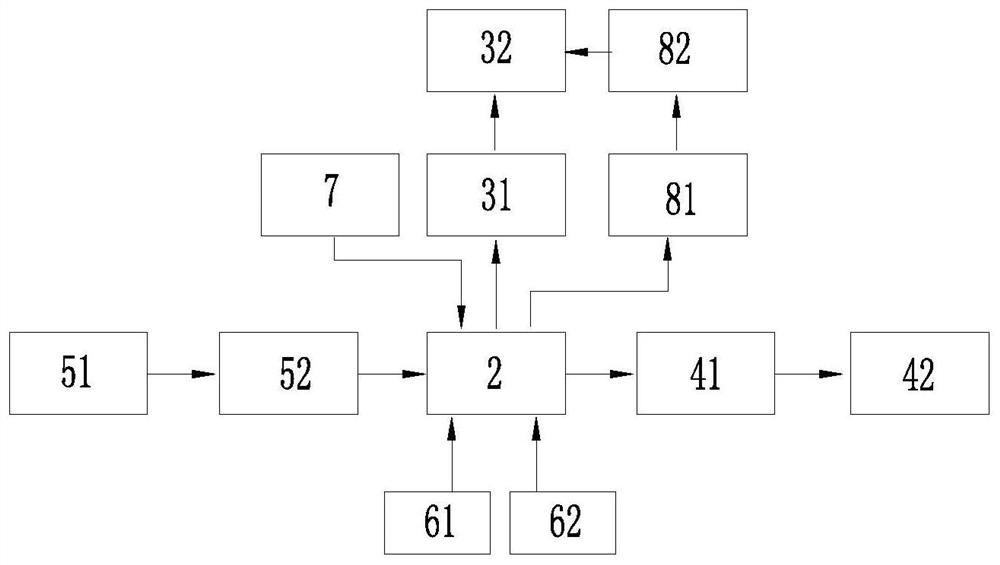
[0042] Such as Figure 1~3 The shown unmanned cleaning vehicle includes a car body 1, and a driving system, a steering system, a road recognition system, an anti-collision system, a brake-by-wire system, a main controller 2 and a cleaning system arranged on the car body 1 . The traveling system is used to execute vehicle traveling, and the traveling system includes a straight-running motor 31 and straight-running wheels 32 , and the straight-running wheels 32 are driven by the straight-running motor 31 . The steering system includes a steering motor 41 and a steering wheel 42 connected to the output end of the steering motor 41 . Wherein, the straight wheel 32 is a rear wheel, and the steering wheel 42 is a front wheel. The road recognition system includes a high-definition camera 51 and an industrial computer 52. The high-definition camera 51 is used to collect images of the road ahead of the vehicle, and the industrial computer 52 is used to process image information, ident...
Embodiment 2
[0050] This embodiment is based on the structure of the unmanned sweeper in embodiment 1, and a driving method of the unmanned sweeper provided includes the following steps:
[0051] Step 1: The system presets the driving route, including the starting point, end point and driving trajectory, the driving speed and time of the straight road section in the driving trajectory, the turning direction, the total turning angle and the number of turns in the curved road section.
[0052] Step 2: The vehicle drives according to the system's preset driving path; during the driving process, the vehicle's road recognition system collects images of the road surface in front of the vehicle through a high-definition camera, identifies the road ahead and plans the driving direction; the vehicle's anti-collision system identifies the distance between the vehicle and the curb signal, adjust the distance between the vehicle and the curb in real time or apply the brakes in time.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com