Diagnosis and treatment integrated operation robot system and navigation positioning method thereof
A technology of surgical robots and hosts, applied in surgical navigation systems, surgical robots, computer-aided planning/modelling, etc., can solve the problems of inability to monitor the spatial position in real time, low operation accuracy, and long operation time, so as to reduce surgical bleeding Quantity, high precision, and the effect of reducing the number of punctures
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
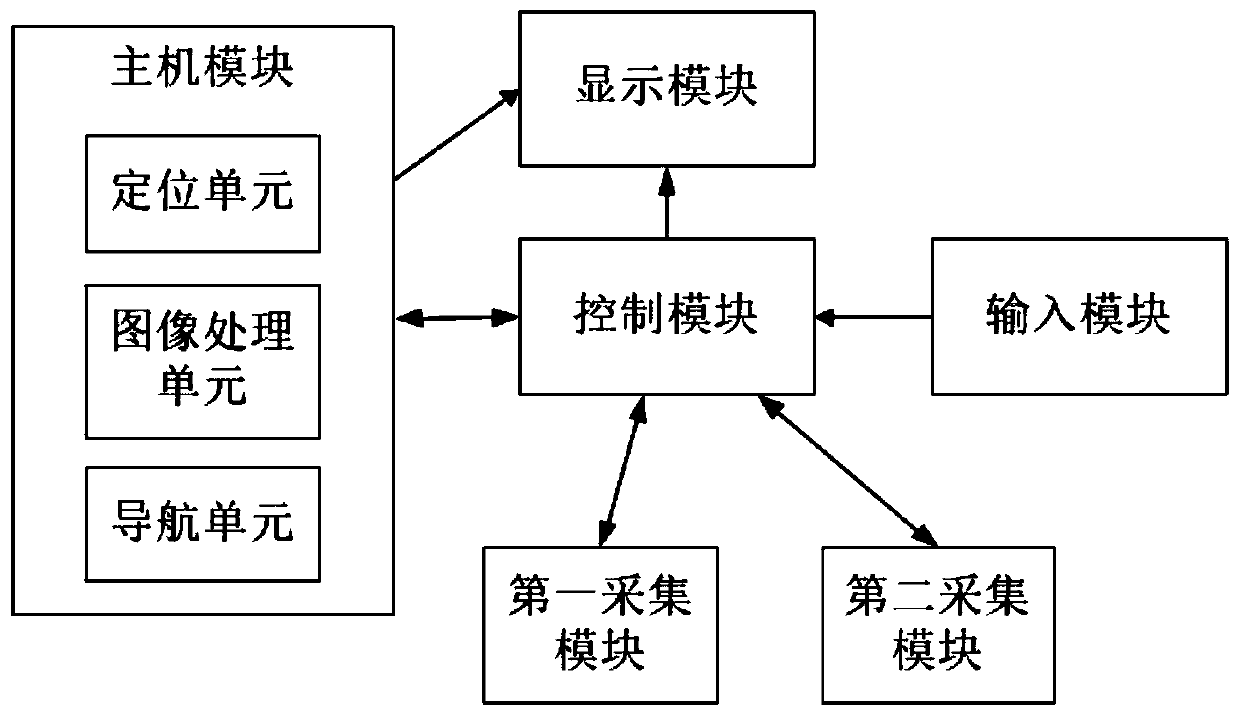
[0049] According to the embodiment of the present application, a kind of diagnosis and treatment integrated surgical robot system is proposed, such as figure 1 As shown, it includes: a first collection module, a second collection module, an execution module, a display module, a control module, a host module and an input module, wherein the control module is connected with the first collection module, the second collection module, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com