Adaptive cruise system with stability active control and adaptive cruise control method with stability active control
An adaptive cruise and active control technology, applied in the field of automobile control, can solve the problems of not considering the influence of lateral stability, low accuracy of working condition identification, and restricted use, etc., to improve lateral stability and longitudinal tracking, good Driving state and safety, the effect of reducing braking energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
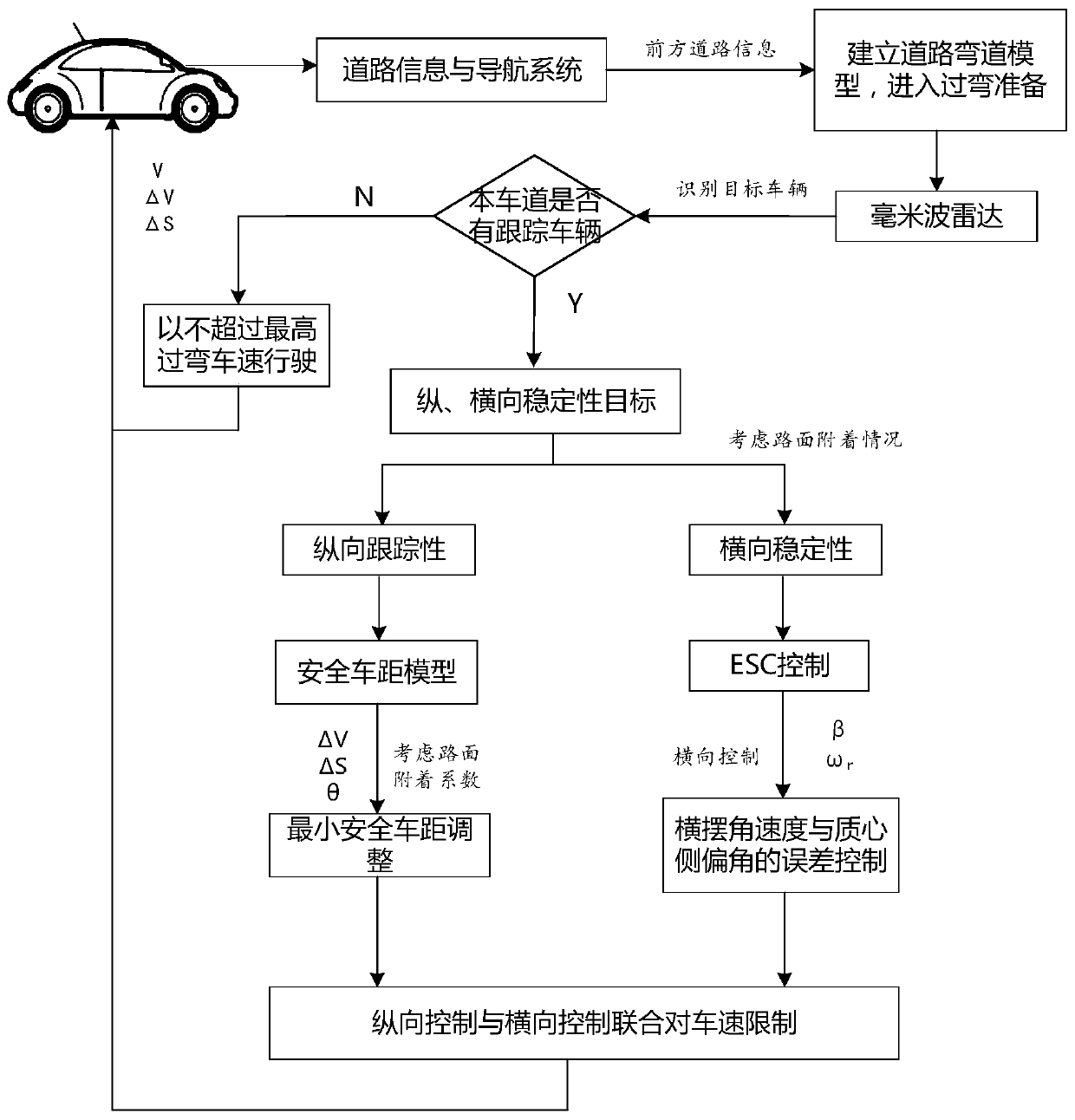
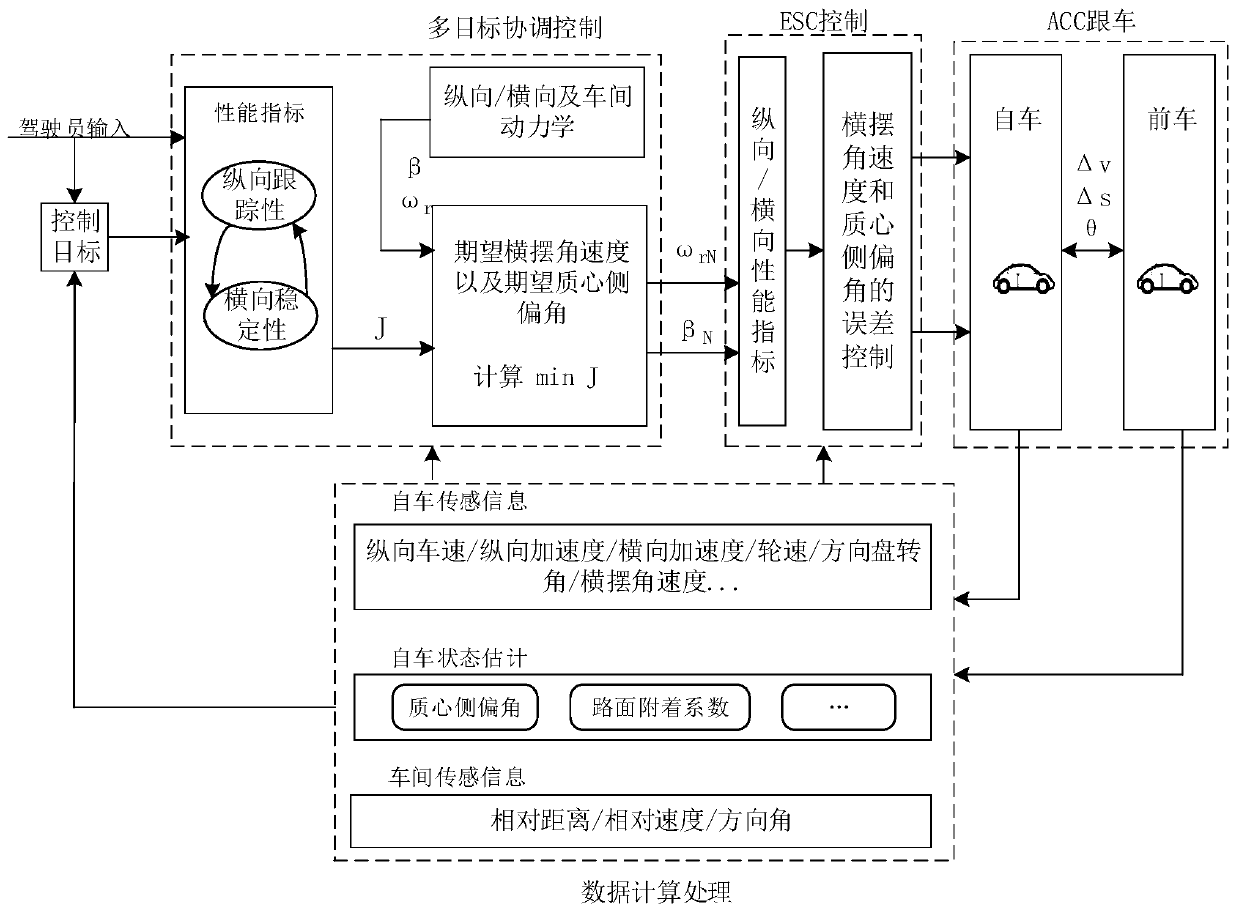
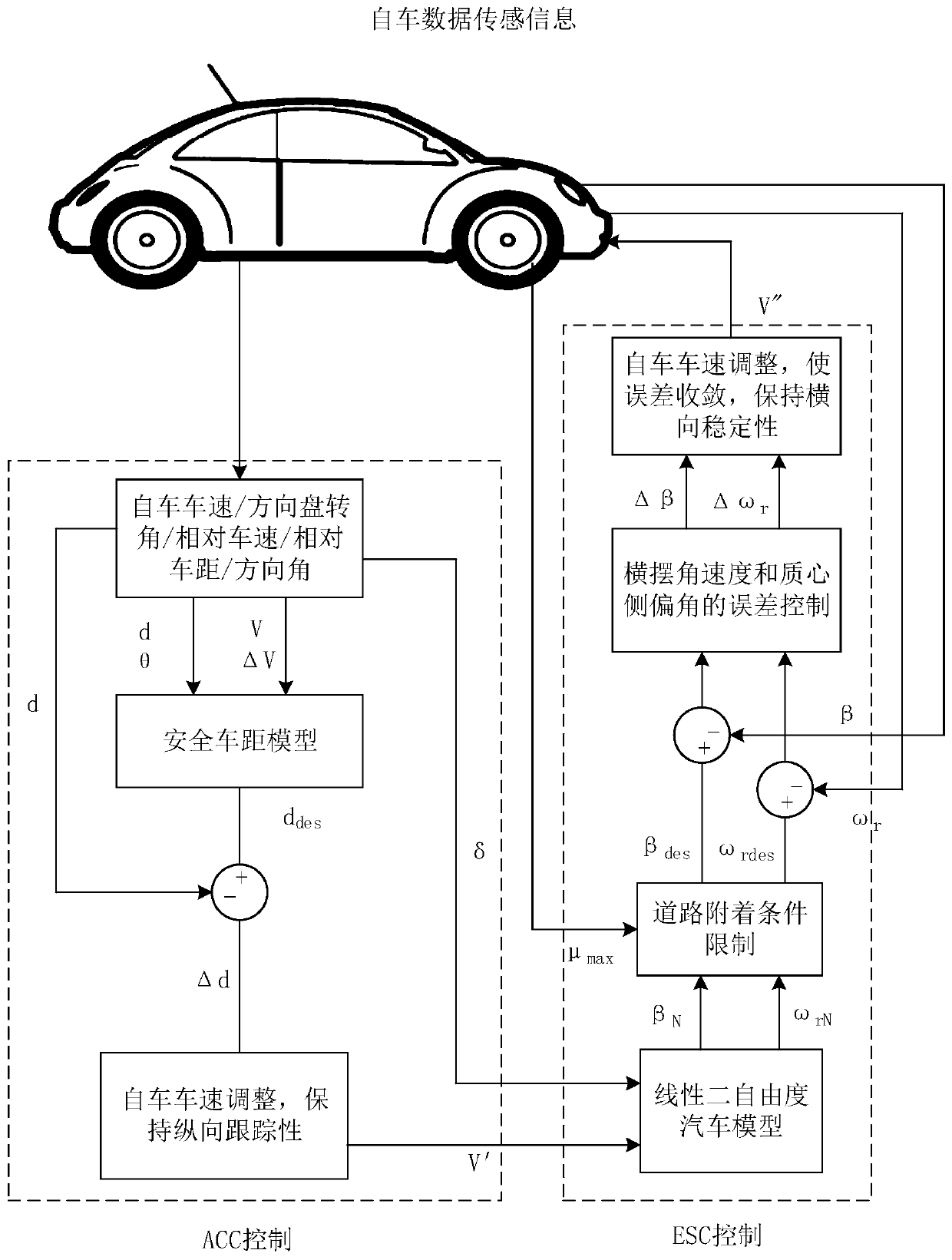
[0073] The embodiment of the present invention provides an adaptive cruise control method with active stability control, and the framework flow is as follows figure 1 As shown, the specific steps are:
[0074] 1. Obtain the road information in advance through the digital map, and model the curved road conditions. The expression of the curved road is as follows:
[0075] C(l)=C 0 +C 1 l (1)
[0076] C 0 , C 1 respectively represent the curvature of the curve and its rate of change, and l represents the length of the curve itself.
[0077] Thus, the direction angle of the curve It can be obtained by one-time integration of formula (1):
[0078]
[0079] The longitudinal distance x(l) and lateral distance y(l) of the curve can be calculated a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com