Robot situational cognitive map constructing and navigating method based on mouse brain location cells
A cognitive map, robot technology, applied in the construction and navigation field of robot situational cognitive map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
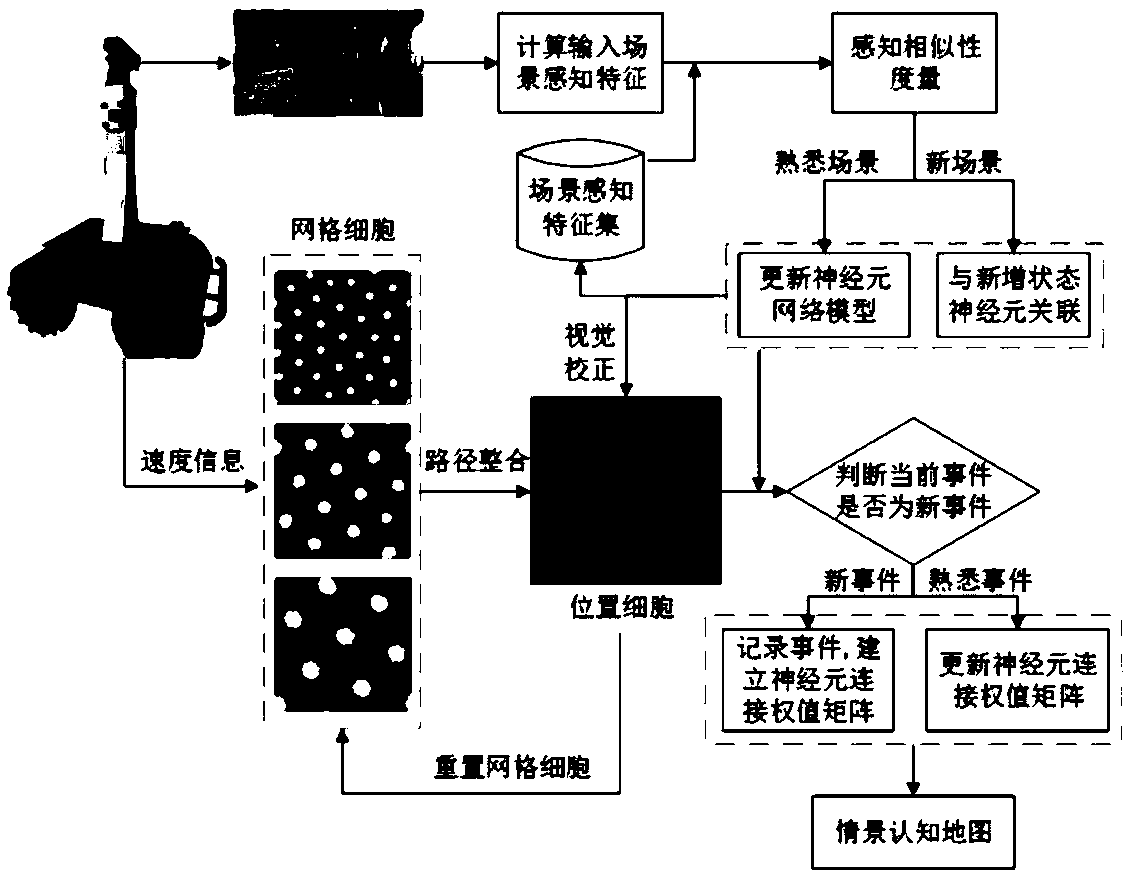
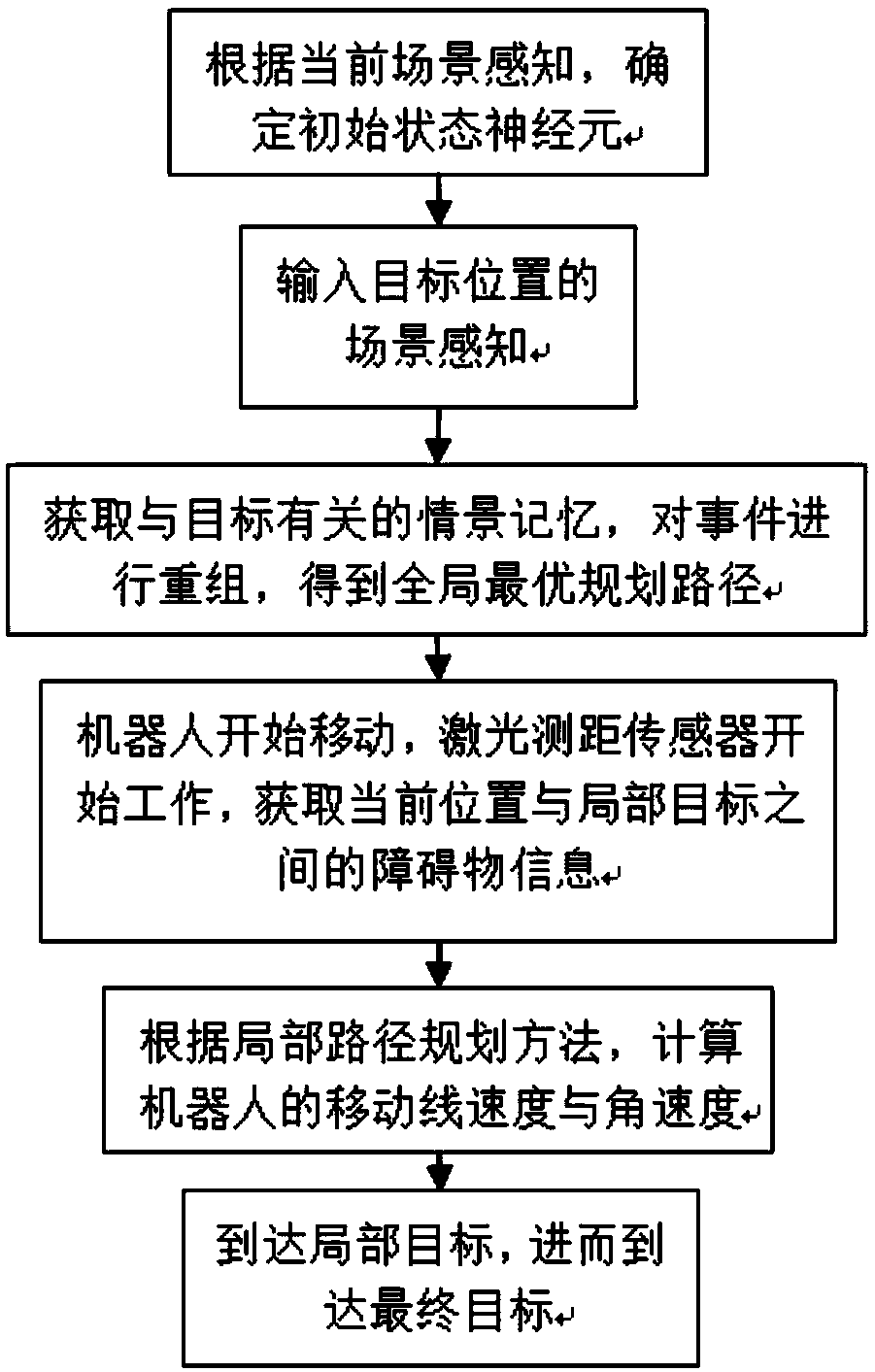
[0096] Compared with the traditional SLAM algorithm, the robot situational cognition map construction method based on the positioning cells in the hippocampus of the mouse brain proposed by this method does not require high-precision sensors and can save costs; The robot completes the accurate construction of the situational cognition map. The navigation method makes global and local planning for the robot's moving trajectory, which can greatly reduce the moving time of the robot and enable the robot to accurately move to the location of the target.
[0097] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings and technical solutions.
[0098] In the embodiment, the following implementation modes are adopted:
[0099] Step (1): Collect data, use the computer to control the mobile robot to move in the environment, collect the speed of the robot and the image information of the position point, and the sa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com