The optimal control method of reconstructable robot decentralized nerves based on judging identification structure
A technology for reconfiguring robots and optimal control, applied in adaptive control, general control systems, control/regulation systems, etc., can solve the problem of low accuracy of decentralized optimal control, reduce computational burden, and reduce steady-state errors , the effect of reducing energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
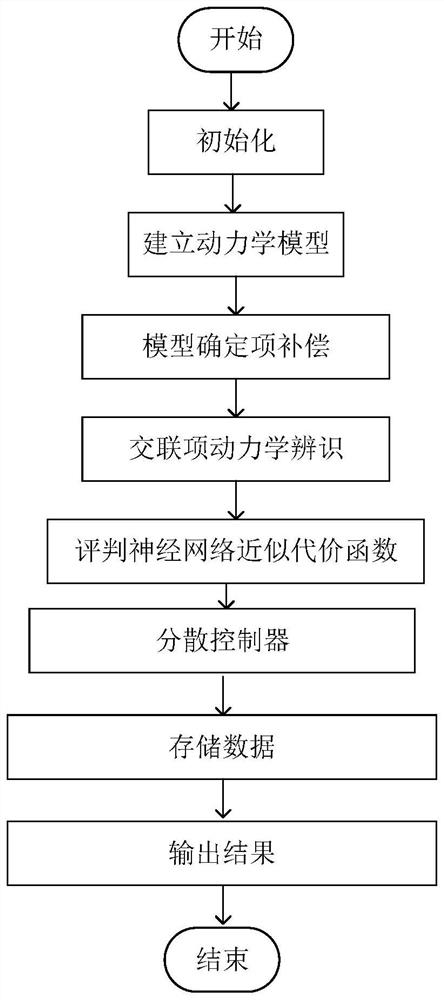
[0102] The present invention will be described in further detail below in conjunction with the accompanying drawings.
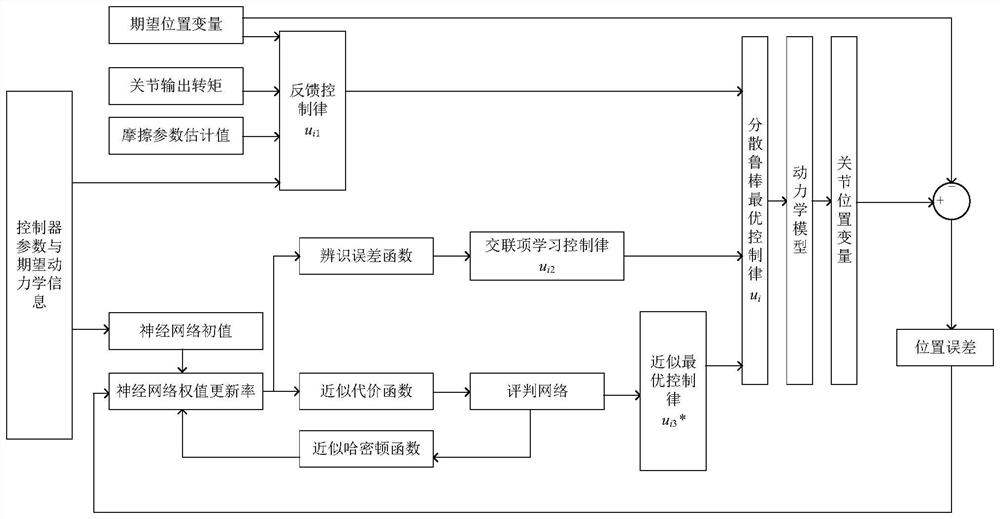
[0103] Such as figure 1 As shown, according to the controller parameters and expected dynamic information, combined with the expected position variable, joint output torque and friction parameter estimates, the model compensation control law u based on local dynamic information is obtained i1 . Determine the initial value of the neural network, obtain the update rate of the weight of the neural network, obtain the identification error function, and obtain the neural network control law u of the identification strategy i2 . By approximating the cost function and evaluating the network, the neural optimal control law based on adaptive dynamic programming is obtained put u i1 , u i2 and Adding together, the optimal control law of distributed nerves is obtained, which is applied to the dynamic model to obtain the joint position variables. The position er...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com