Robot gripper
A robot gripper and robot technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve problems such as falling off, safety accidents, and limited adsorption force of electromagnetic suckers, so as to achieve the effect of improving the grasping force and ensuring stable grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0027] robot gripper
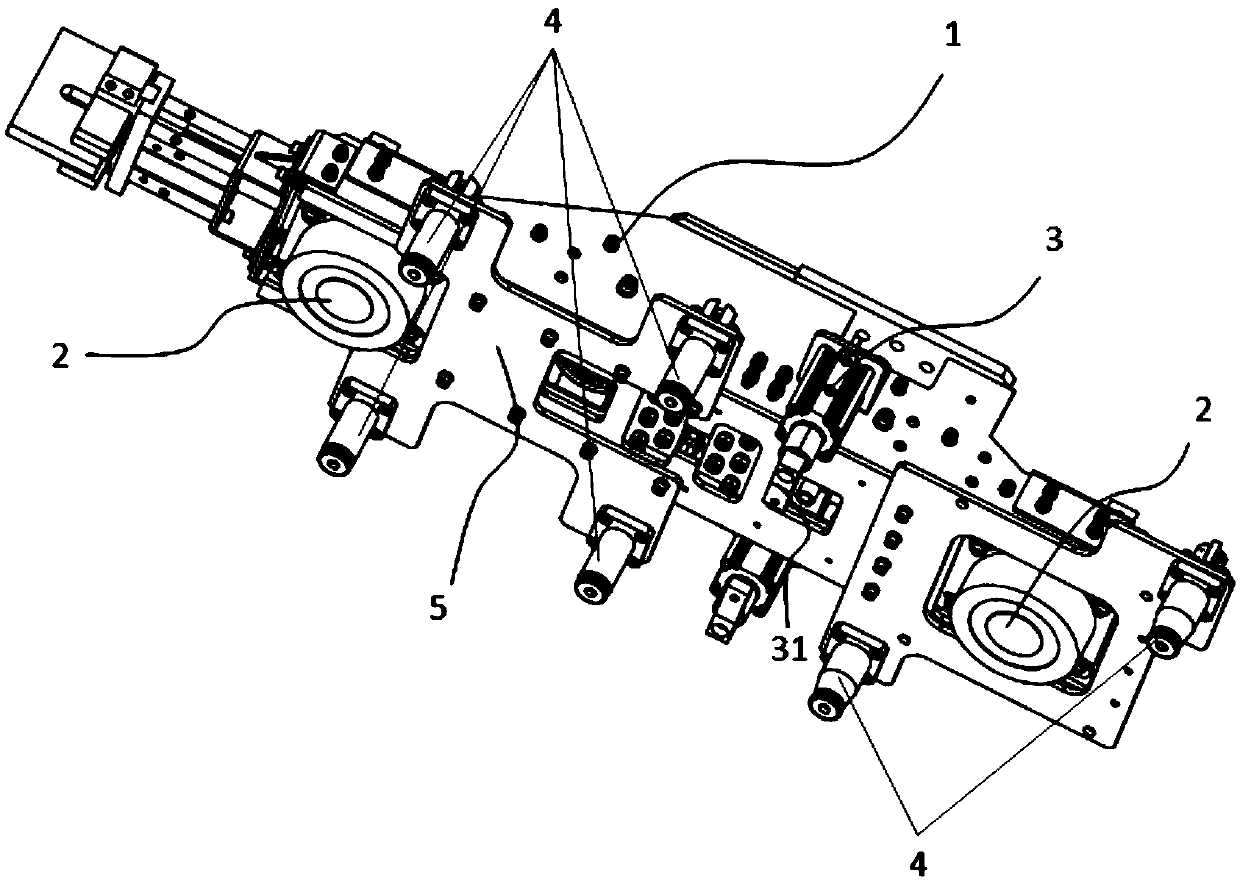
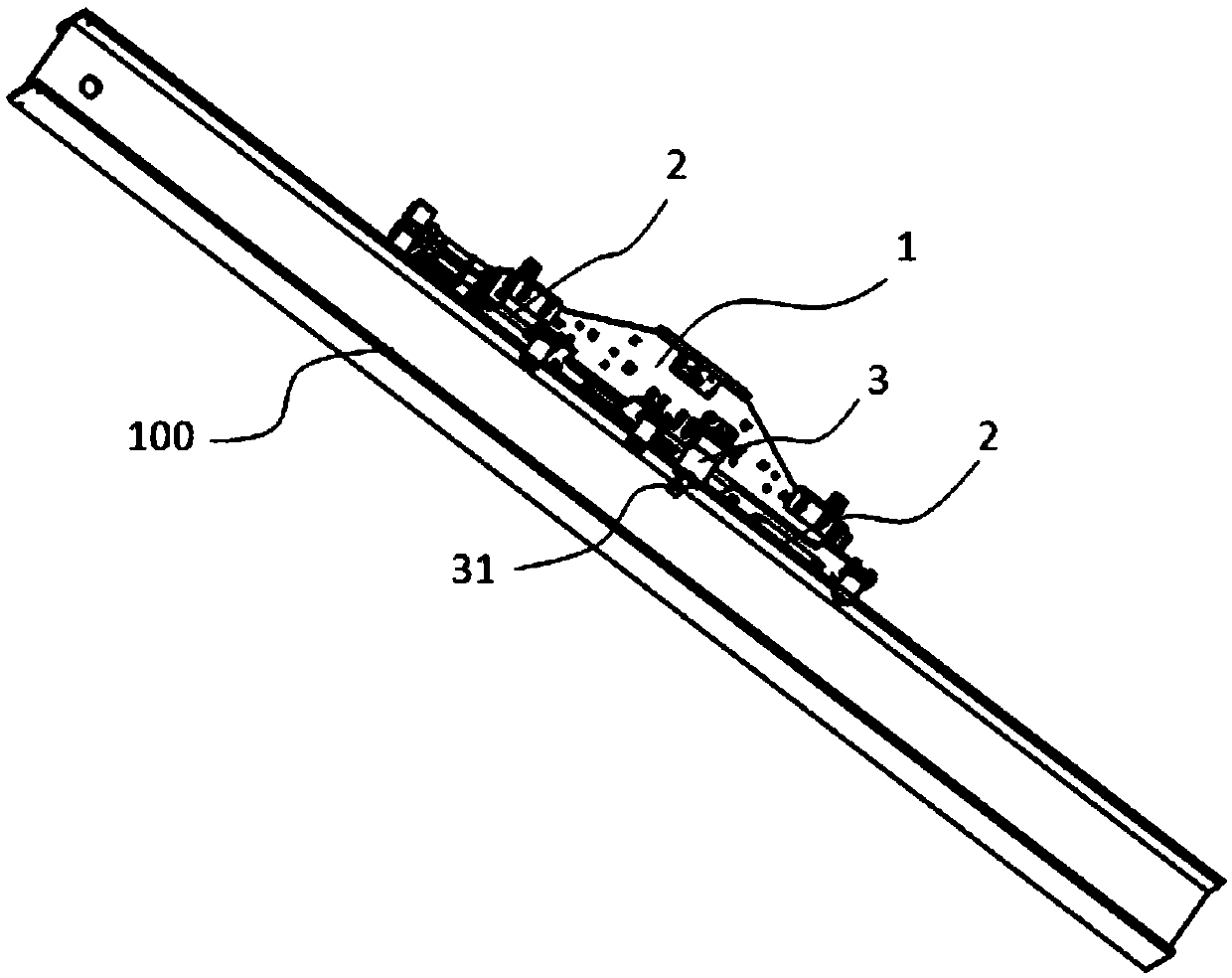
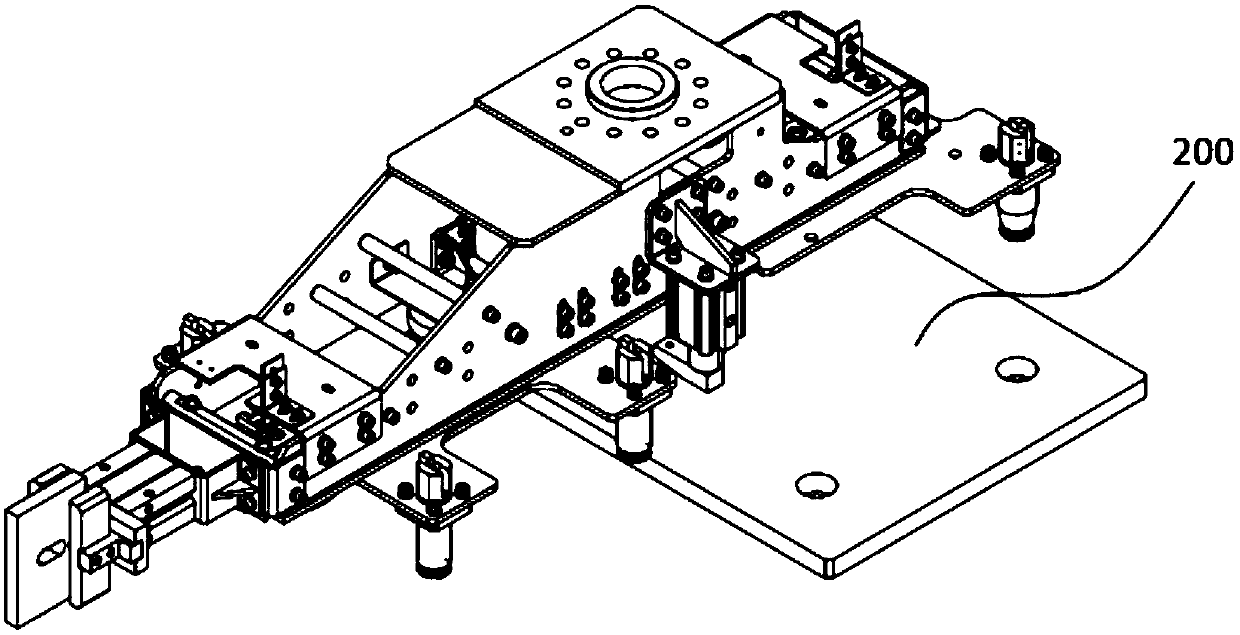
[0028] One aspect of the present invention provides a robot gripper, the robot gripper is installed at the end of a robotic arm of a robot, and is used for grabbing a workpiece made of ferromagnetic material. Such as figure 1 As shown, it is a structural schematic diagram of a robot gripper of the present invention in a specific embodiment. The robot gripper includes a mounting bracket 1, at least one electromagnetic chuck 2 and at least one set of rotary clamping cylinders.
[0029] The electromagnetic chuck 2 is arranged on the bottom of the mounting bracket 1 . The electromagnetic chuck 2 can generate electromagnetic adsorption force after being energized, thereby absorbing the workpiece made of ferr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com