


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Method, device, terminal, and computer-readable storage medium for quadruped robot landing foot force distribution
A technology of quadruped robot and distribution method, which is applied in manipulators, motor vehicles, transportation and packaging, etc., can solve the problems of low efficiency, negative impact of robot control sensitivity, and huge calculation amount of numerical methods, and achieves high computational efficiency and hardware cost. Low, increase the effect of linear constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
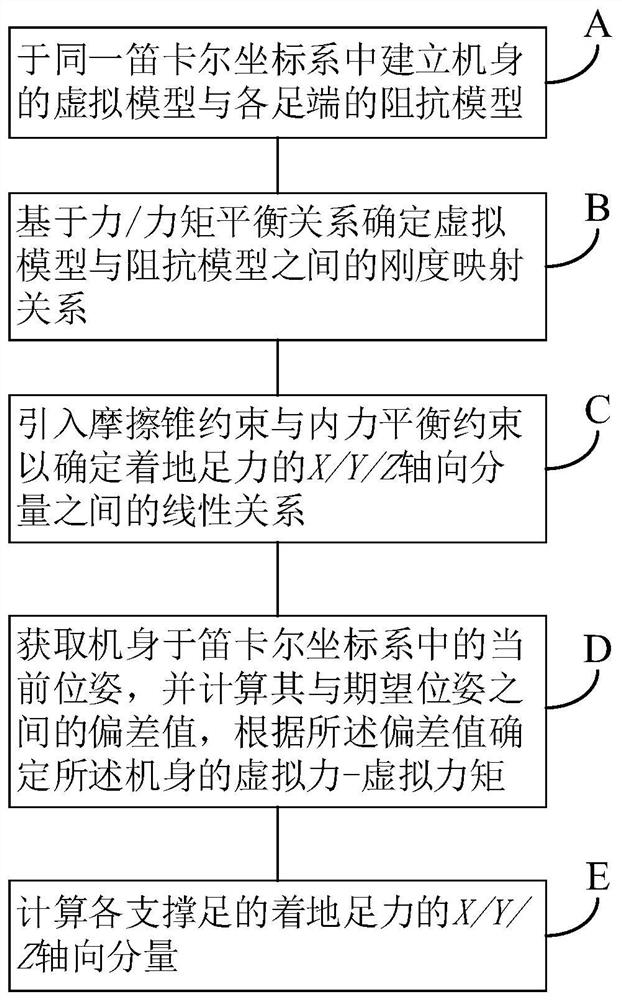
[0065] see figure 1 , the present embodiment provides a method for distributing foot force of a quadruped robot on the ground, the method comprising the following steps:
[0066] Step A: Establish a virtual model of the fuselage and impedance models of each foot in the same Cartesian coordinate system.
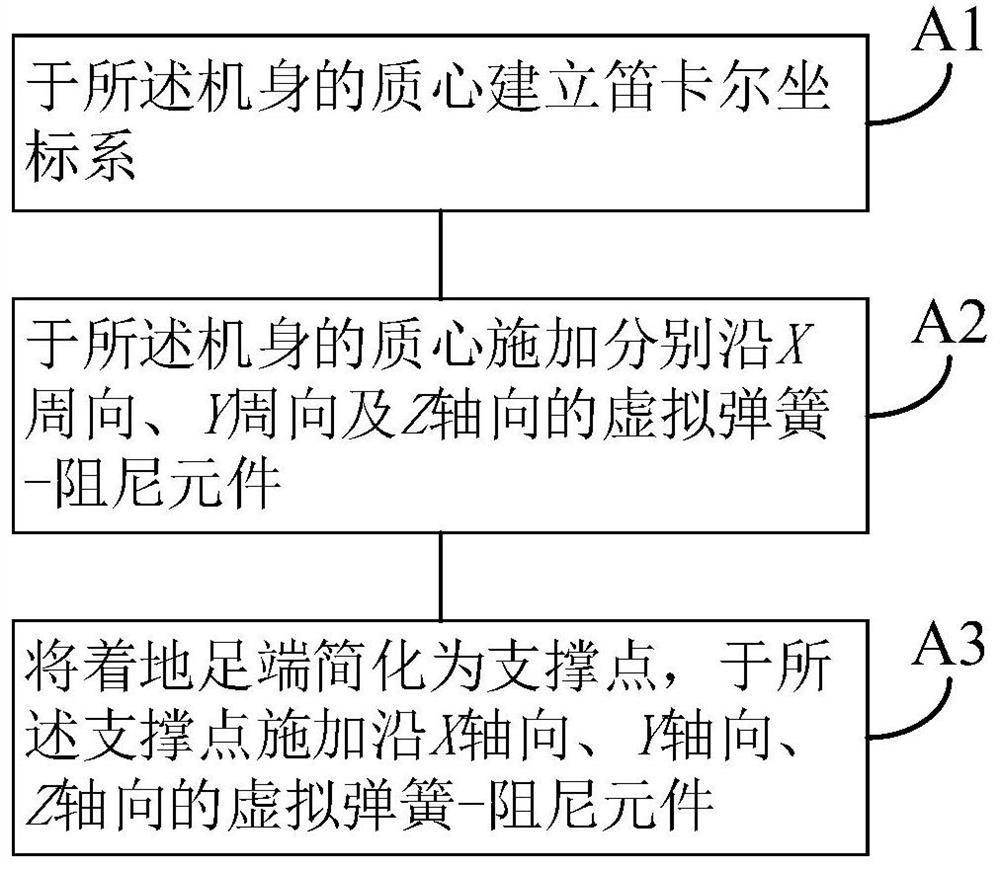
[0067] see figure 2 , Exemplarily, Step A includes:
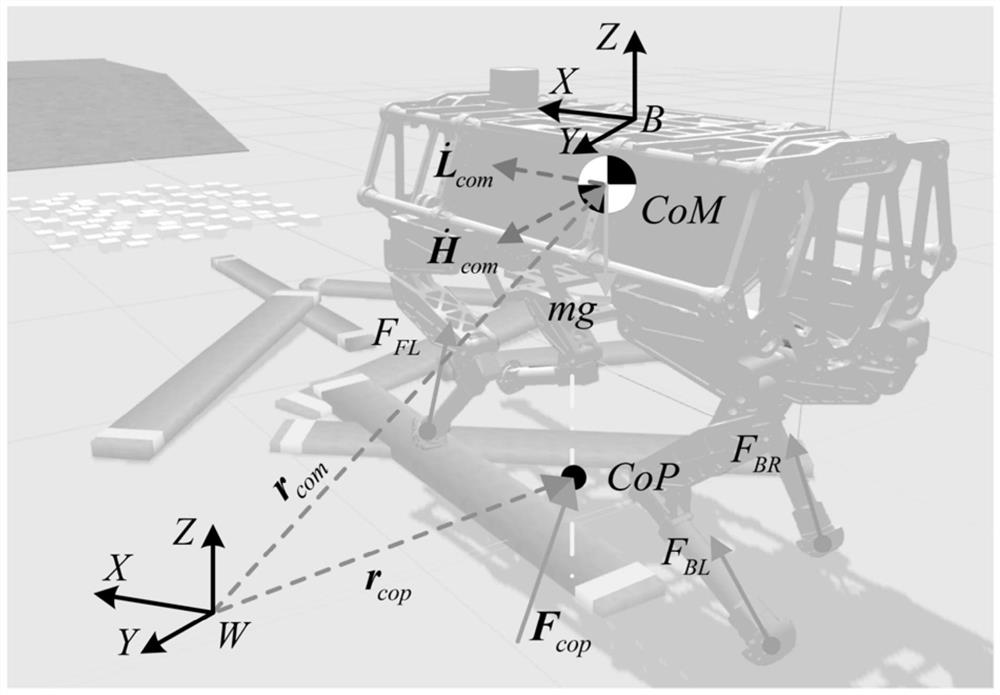
[0068] Step A1: See image 3 , establish a Cartesian coordinate system (B) at the center of mass (COM) of the fuselage. The Cartesian coordinate system (B) has an X-axis, a Y-axis and a Z-axis that maintain an orthogonal relationship, wherein: the X-axis is a horizontal axis, and its axis represents the forward and backward direction of the robot; the Y-axis is another axis perpendicular to the X-axis. A horizontal axis, the axial direction of which represents the lateral movement direction of the robot; Z axis is the vertical axis, and its axial direction is the vertical direction. In a quadruped robot, the landing f...
Embodiment 2
[0099] see Figure 6 , this embodiment provides a foot force distribution device 100 for a quadruped robot, which includes:
[0100] The modeling module 110 is used to establish the virtual model of the fuselage and the impedance model of each foot end in the same Cartesian coordinate system;
[0101] A mapping module 120, configured to determine a stiffness mapping relationship between the virtual model and the impedance model based on a force / torque balance relationship;
[0102] The linearization module 130 is used to introduce the friction cone constraint and the internal force balance constraint to determine the linear relationship between the X / Y / Z axial components of the foot force on the ground;
[0103] The virtual force module 140 is used to obtain the current pose of the fuselage in the Cartesian coordinate system, and calculate the deviation value between it and the expected pose, and determine the virtual force-virtual moment of the fuselage according to the devi...
Embodiment 3
[0114] see Figure 9 , the present embodiment provides a terminal 200, the terminal 200 includes a memory 210 and a processor 220, the memory 210 is used to store a computer program, and the processor 220 executes the computer program to enable the terminal 200 to realize the above-mentioned quadruped robot landing force Allocation method.
[0115] Wherein, the terminal 200 includes terminal devices (such as computers, servers, etc.) that do not have mobile communication capabilities, and also includes mobile terminals (such as smart phones, tablet computers, vehicle-mounted computers, smart wearable devices, etc.).
[0116] The memory 210 may include an area for storing programs and an area for storing data. Wherein, the storage program area can store the operating system, at least one application program required by the function (such as sound playback function, image playback function, etc.); the storage data area can store data created according to the use of the terminal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com