Control method and device for automatic driving vehicle
A technology of automatic driving and control methods, applied in control devices, vehicle components, transportation and packaging, etc., can solve problems such as traffic accidents, personal and property injuries, avoid personal and property losses, and realize the effect of human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
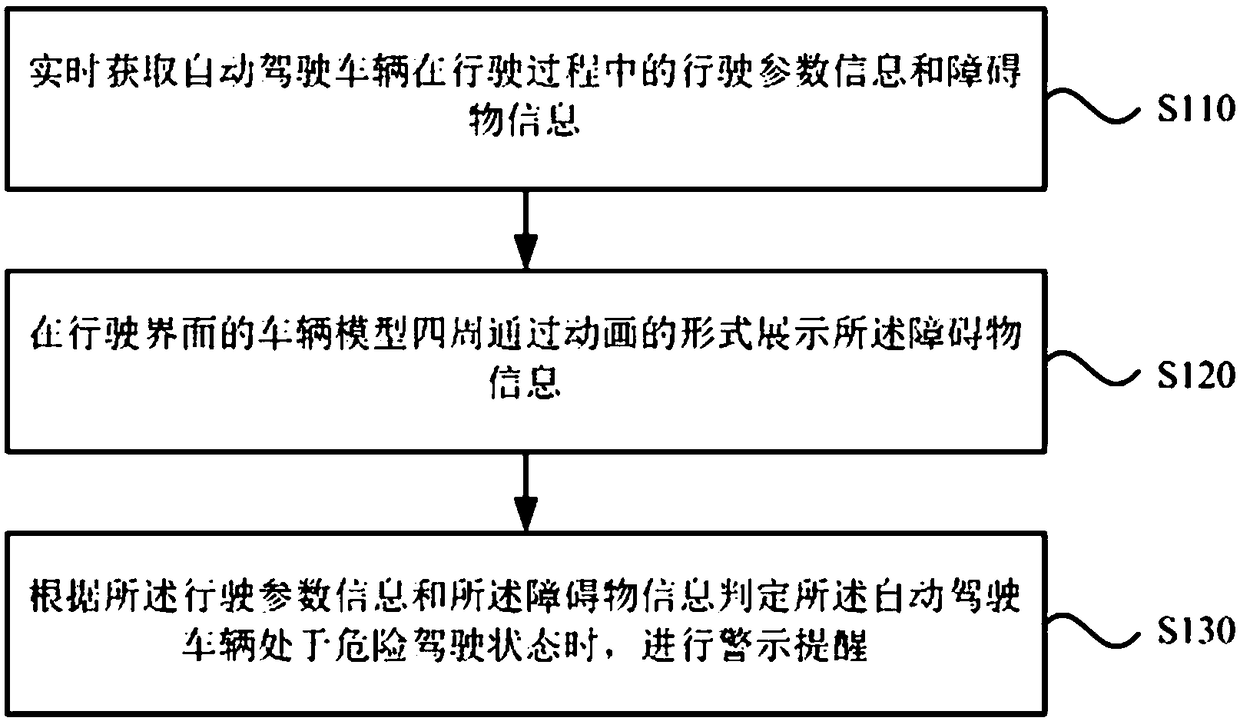
[0051] This embodiment provides a control method for an automatic driving vehicle that is applicable to control the driving of the automatic driving vehicle. The method is implemented by using the control device for the automatic driving vehicle provided in the embodiment of the present invention. The device can be implemented by software and / or Hardware composition, can be integrated in the display terminal. Wherein, the self-driving vehicle may be, for example, an unmanned vehicle or a wheeled mobile robot. figure 1 It is a flowchart of a control method for an automatic driving vehicle provided in Embodiment 1 of the present invention. like figure 1 , the control method of the self-driving vehicle provided in this embodiment includes:
[0052] S110. Acquiring driving parameter information and obstacle information of the autonomous driving vehicle during driving in real time.
[0053] Specifically, a self-driving vehicle is a vehicle that can drive itself without the need ...
Embodiment 2
[0064] This embodiment is optimized on the basis of the above embodiments, and provides a preferred method of judging that the self-driving vehicle is in a dangerous driving state based on the driving parameter information and obstacle information on the basis of the above embodiments, specifically is: according to the driving parameters and the obstacle information, determine the relative distance between the self-driving vehicle and the obstacle; when the relative distance is less than a preset dangerous distance, determine that the self-driving vehicle is in dangerous driving status, and give a warning reminder. Figure 4 It is a flow chart of a control method for an automatic driving vehicle provided in Embodiment 2 of the present invention. like Figure 4 , the method of this embodiment includes:
[0065] S210. Acquiring driving parameter information and obstacle information of the self-driving vehicle during driving in real time;
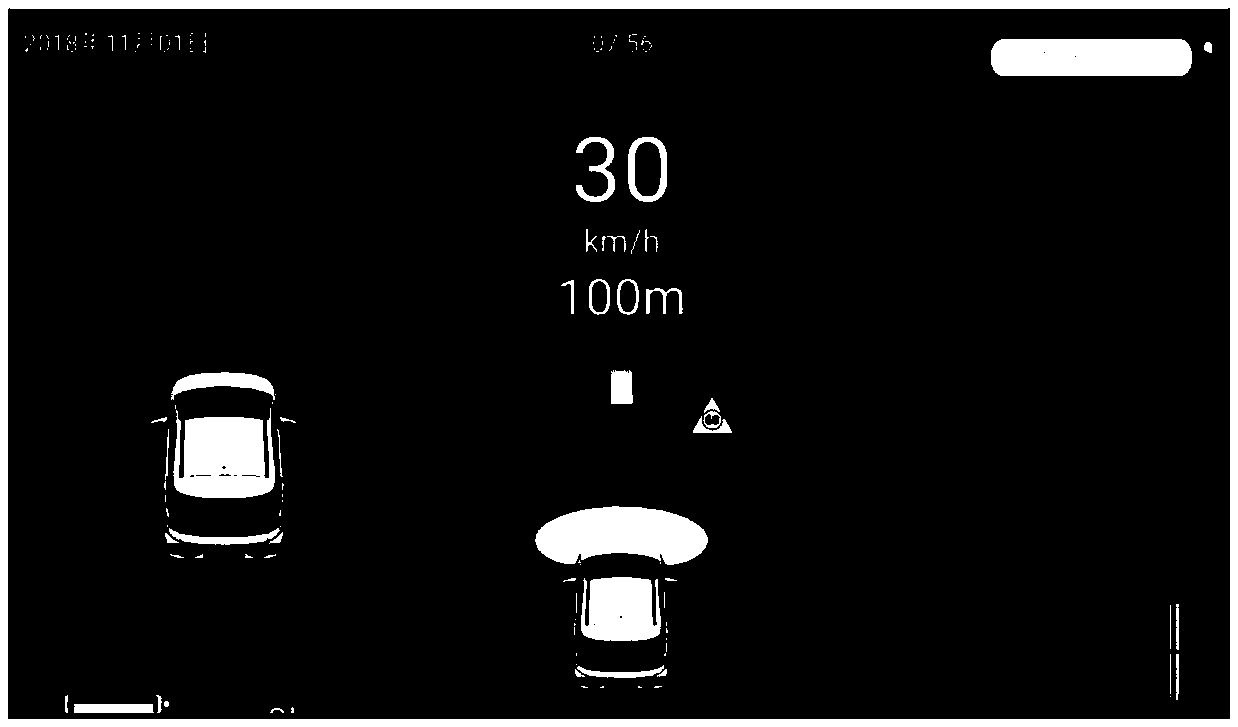
[0066] S220, displaying the obstacle...
Embodiment 3
[0074] This embodiment is optimized on the basis of the above embodiments, and provides a preferred specific method of adding destination input and route planning on the basis of the above embodiments, specifically: providing a destination selection interface; the destination The selection interface displays the destination input area, driving parameter information, and the current date and time; obtains the destination information input by the user; when obtaining the destination confirmation instruction, plans the driving route according to the destination information and displays it; obtains the destination information selected by the user. Planning a driving route and controlling the self-driving vehicle to drive on the planned driving route selected by the user. Figure 5 It is a flow chart of a control method for an automatic driving vehicle provided in Embodiment 3 of the present invention. like Figure 5 , the method provided in this embodiment includes:
[0075] S31...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com