Visual-inertial tightly coupled integrated navigation method based on firefly swarm optimization pf
A technology of integrated navigation and swarm optimization algorithm, applied in the field of visual-inertial tightly coupled integrated navigation based on firefly swarm optimization PF, can solve the problems of poor real-time performance, large amount of calculation, particle depletion, etc., to improve real-time performance and improve navigation. Accuracy, the effect of improving real-time and navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
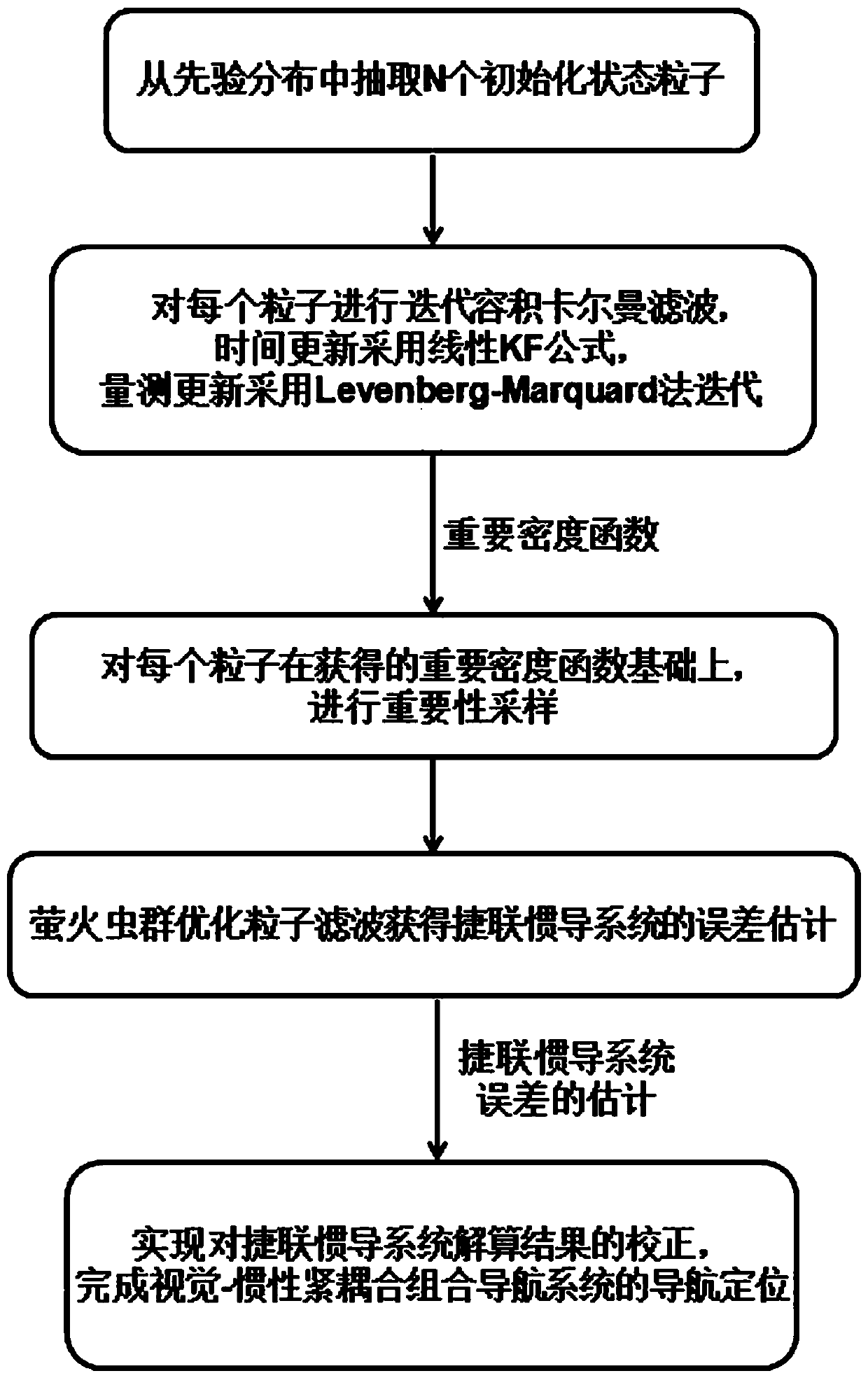
[0021] A visual-inertial tightly coupled integrated navigation method based on firefly swarm optimization PF, which is implemented by the following steps:
[0022] Step S1: Install the strapdown inertial navigation system and the binocular visual odometer on the carrier, the strapdown inertial navigation system and the binocular visual odometer together form a visual-inertial tightly coupled integrated navigation system; the strapdown inertial navigation system collects Calculate the nominal motion information of the carrier from the obtained data; use the SURF algorithm to perform feature matching on the image sequence collected by the binocular visual odometer, and calculate the pixel coordinate information of the matching points of two consecutive frames of images;
[0023] Step S2: According to the error characteristics of the strapdown inertial navigation system, establish the linear state equation of the visual-inertial tightly coupled integrated navigation system; use th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com