Robust self-adaptive sliding-mode control method for flexible-hinge space station manipulator
A technology of robust adaptive and control method, applied in the field of robust adaptive sliding mode control of flexible hinge space station manipulators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0085] The present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
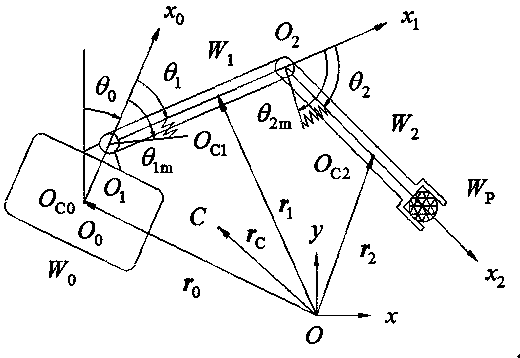
[0086] figure 1 It is a schematic diagram of the flexible hinge space station manipulator system of the present invention; figure 1 Explanation of labels, symbols and lines in : The system is carried by a free-floating space station , two elastic joints and two rigid arms and end load Composition; the symbol conventions used in the text are as follows: Respectively, the mass of the carrier, the moment of inertia and the distance from the center of mass to the center of the first joint hinge; connecting rod The mass, moment of inertia and length of are the mass and moment of inertia of the terminal load, respectively; for flexible joints The equivalent moment of inertia of the drive motor, is the torsional stiffness of each joint hinge; are the position vectors of the center of mass of the carrier and connecting r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com