Rope-driven mechanical finger and manipulator with same
A technology driven by mechanical fingers and ropes, applied in the field of manipulators, can solve the problems of inability to place poultry eggs arbitrarily, flexibility, and low applicability, and achieve the effects of small moment of inertia, lightening the overall weight, and simplifying the structure of the manipulator
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
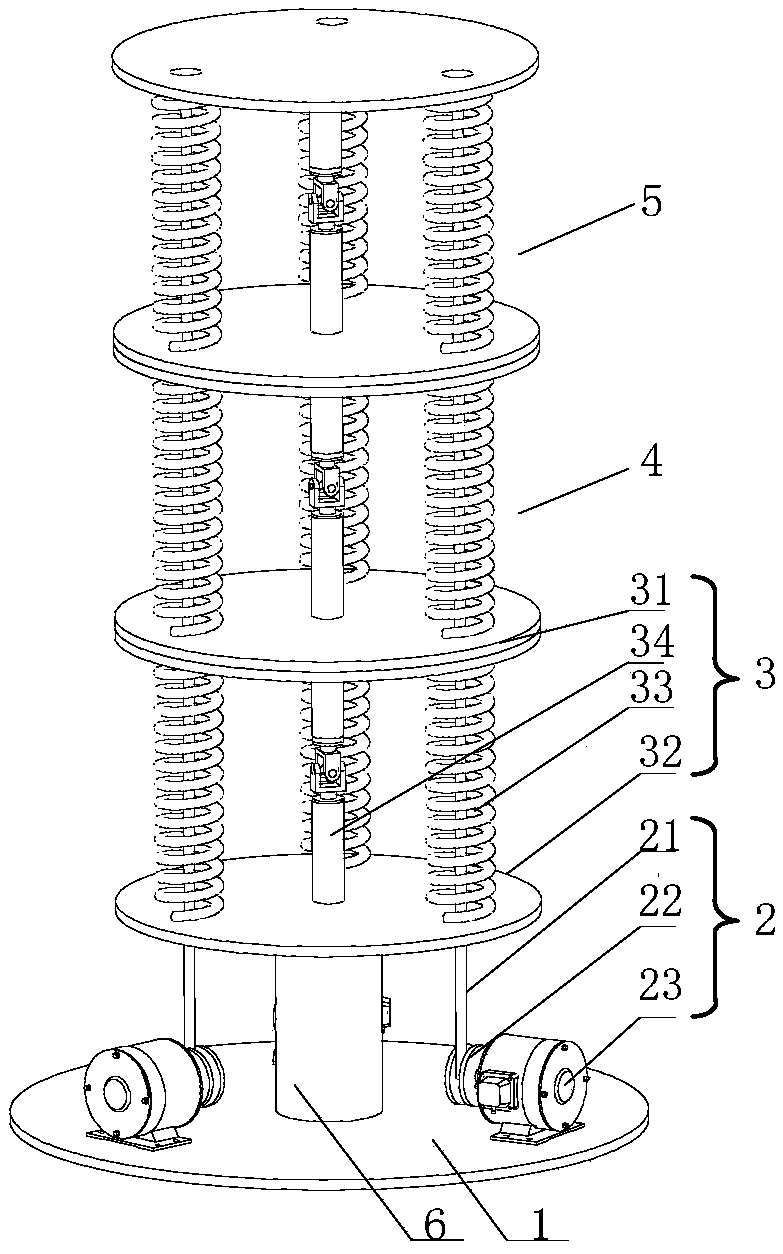
[0021] Such as figure 1 As shown, a rope-driven mechanical finger includes a base 1, a rope driving device 2, a first finger segment 3, a second finger segment 4 and a third finger segment 5, the base 1, the first finger segment 3, the second finger segment The second finger section 4 and the third finger section 5 are coaxially connected in series successively, and the first finger section 3, the second finger section 4 and the third finger section 5 all include an upper platform 31, a lower platform 32, a central support mechanism 34 and a plurality of springs 33. The lowe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com