


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A method for automatically generating an action plan of an unmanned aerial vehicle group
An action plan and automatic generation technology, applied in genetic rules, instruments, data processing applications, etc., can solve problems that cannot be called automatic generation methods, and cannot reach the automation accuracy of drone swarms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
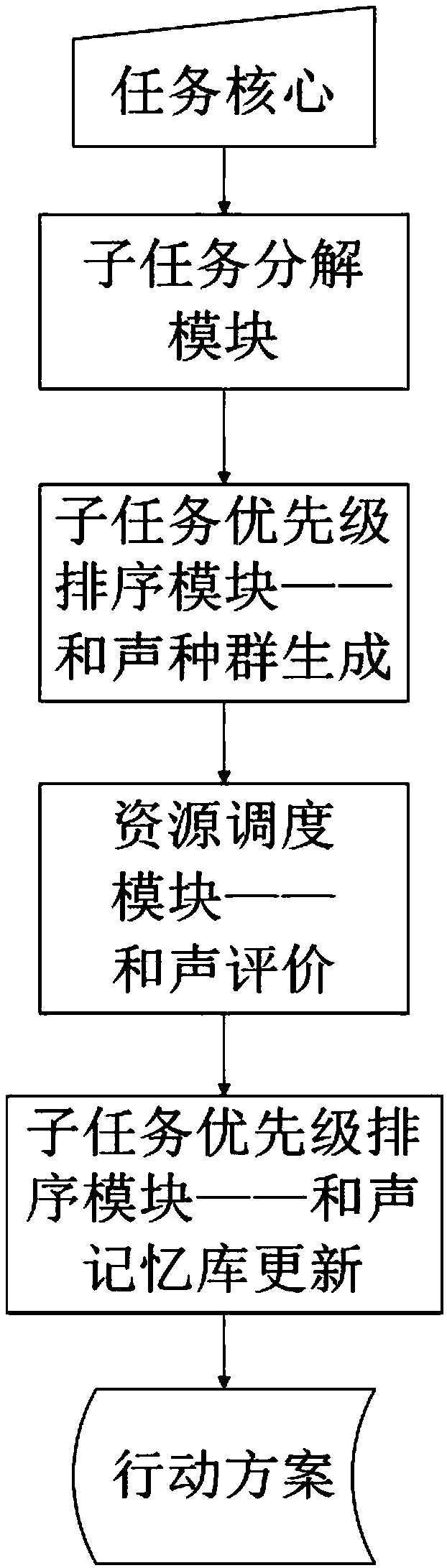
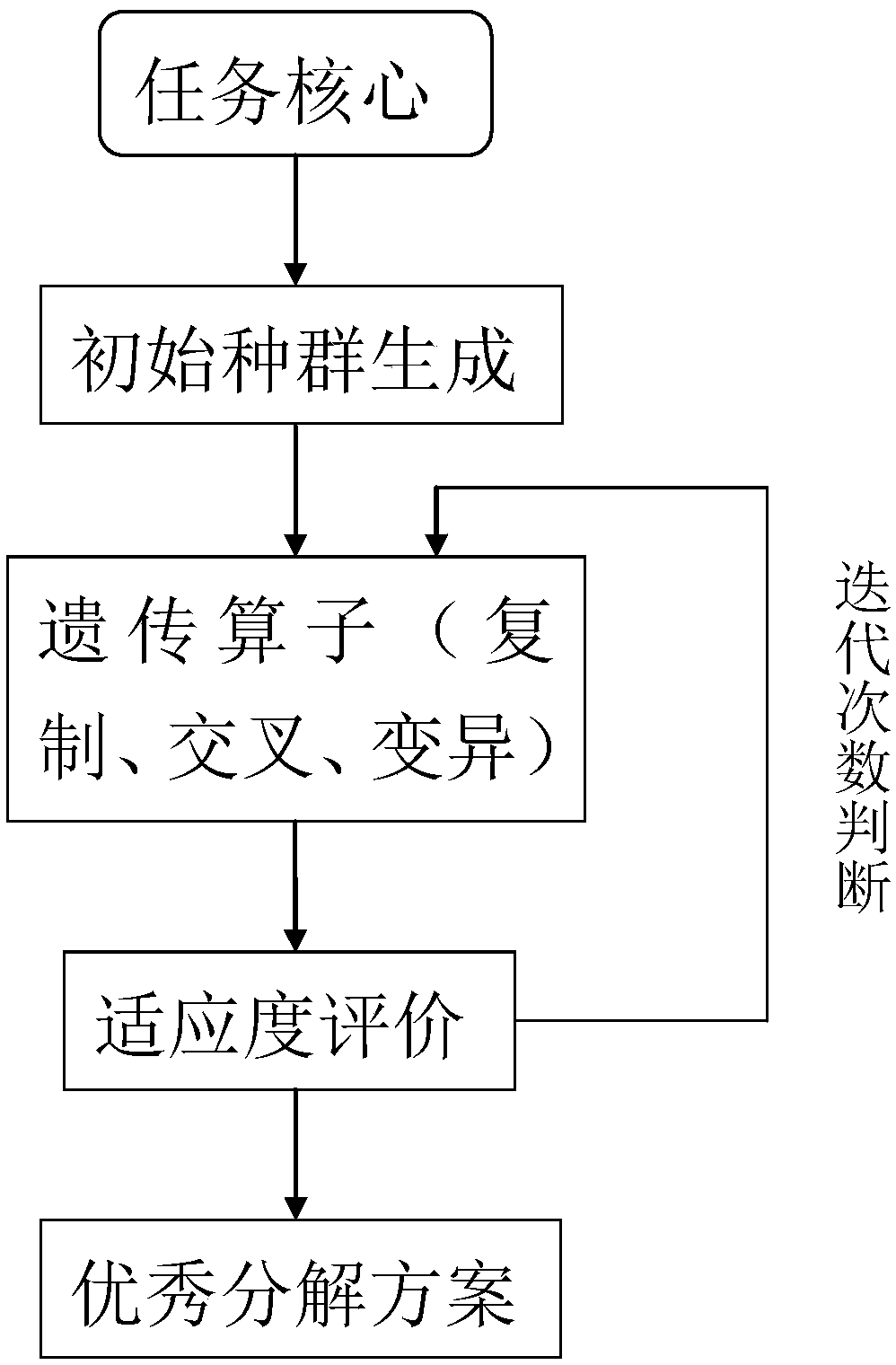
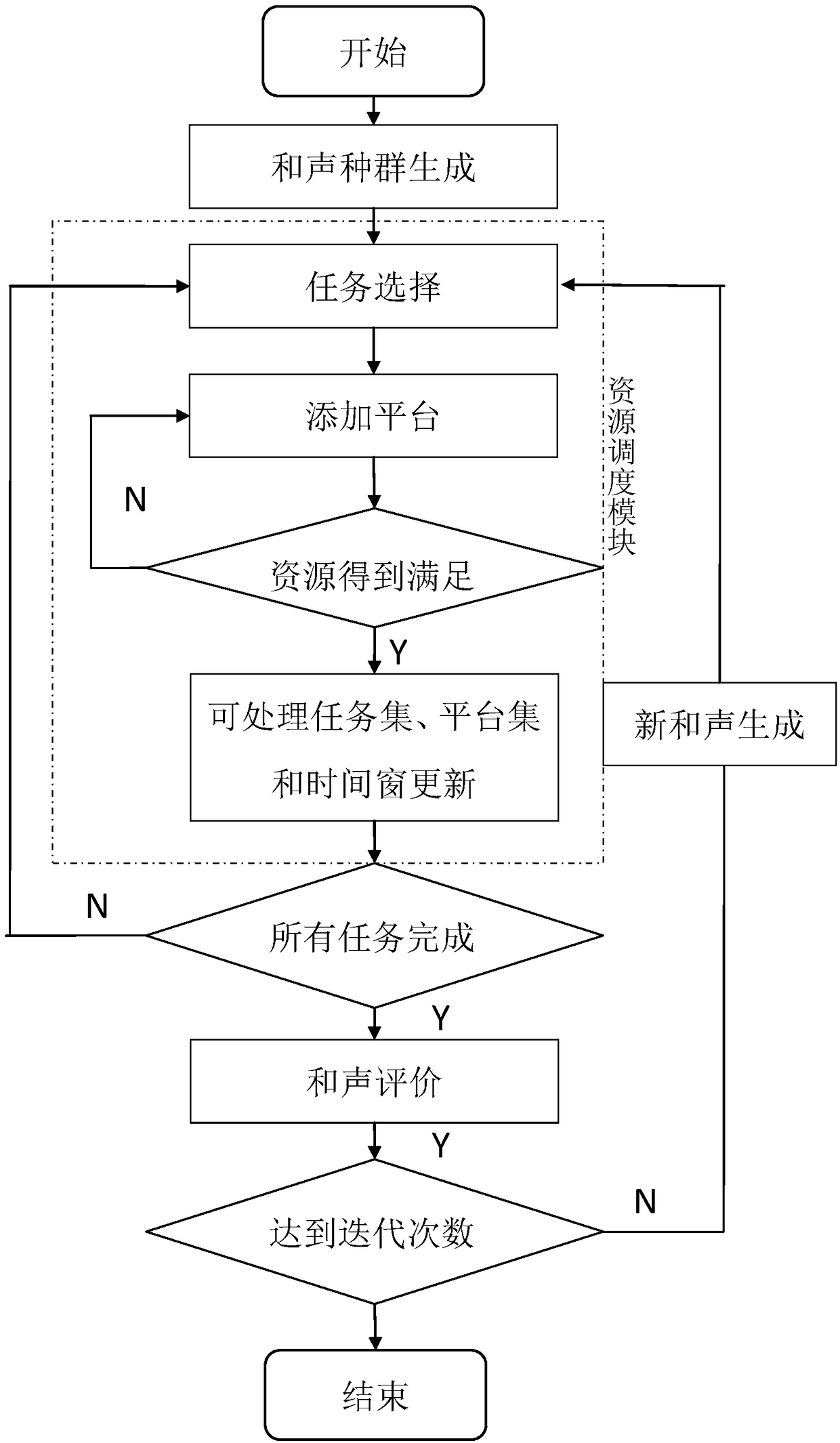
[0106] The embodiment is as follows: a fire breaks out in a forest, and there are 10 fire points to be extinguished. 20 fire-fighting drones are now dispatched to the forest to fight the fire. The core of the task is to extinguish all flames at the ignition point and prevent further spread. Firstly, the scene model is established according to the core of the task. In the first step, in the subtask decomposition module, clustering is carried out to decompose it into several subtasks according to the distance from the UAV to the ignition point and the size of the fire. The second step is to use the harmony search algorithm to generate these subtasks. Several priority sequences are waiting for resource scheduling. The third step is to schedule UAV resources for the priority sequences of each harmony individual in the harmony search algorithm, and use parameters such as fire control ability, fire extinguishing ability, and UAV speed as resources. Ability to use multi-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com